{kind=link}
| Uke\Ukedag | Mandag | Tirsdag | Onsdag | Torsdag | Fredag | Lørdag | Søndag |
|---|---|---|---|---|---|---|---|
| Uke 47 | - | - | - | - | D: Eksamen 2022 | D: Filterdesign A: Problemer og algoritmer | D: Kap 12 og 14 (estimering) A: Datastrukturer |
| Uke 48 | D: A: Splitt og hersk | D: A: Rangering i lineær tid | D: A: Rotfaste trestrukturer | D: A: Dynamisk programmering | D: A: Grådighet og stabil matching | D: A: Traversering av grafer | D: 2018k A: Minimale spenntrær |
| Uke 49 | D: 2017h A: Korteste vei fra en til alle | D: Eksamen 2017k | D: Eksamen 2015/2022 | Eksamen Digsig | A: Korteste vei fra alle til alle, Maksimal flyt | A: NP | A: Eksamen 20__ |
| Uke 50 | A: Eksamen 20__ | Eksamen Algdat | K2019 | H2019, K2022 | |||
| Uke 51 | L: H2022 | Eksamen Linsys | - | - | - | Julaften |
Digital Signalbehandling, 07.12.2023
Forelesningsplan: TTT4120_forelesningsplan_h2023.pdf Formelark: TTT4120_formulas.pdf
| . | Gjort | Bemerkninger |
|---|---|---|
| 2022 | x | 3e,3f |
| 2019 | x | 1c, 2, 4d, 4f |
| 2018h | x | 1a, 2b, 3b, 4c |
| 2018k | x | 3b,3c |
| 2017h | ||
| 2017k | ||
| 2015 | ||
| 2014 | ||
| 2012 |
**Spørsmål:**1
- Forskjell på Autocovariance og Autocorrelation. Hvorfor er
* $\delta(l)=0 \;\forall\; l\neq 0$
- Plassering av multiplikasjonstegn i opg2b. Blir det annerledes?
Svakheter:
- Filterdesign og estimering
- Minimum phase
- Forskjell FT,DFT,DTFT
- radix-2-fft
- Linear prediction
Pugg:
- Scaling factor
- Evaluate the performance of an AR(2) estimate:
- Minimum length of radix-2 FFT needed to compute a signal , where is the length of the sequence
- Autocorrelation estimators
-
- , BIASED FOR or
-
- UNBIASED
- , BUT variance increases as
-
- Linear phase if we have a point of symmetry!!!
Algoritmer og Datastrukturer, 12.12.2023
Oversikt: Oversikt AlgDat Pensumoversikt: Pensumoversikt AlgDat Forelesningsplan: TDT4120_forelesningsplan_h2023
Les:
- Rekurrensligninger (Master-theorem spesielt, Substitution Method)
- Korrekthetsbevis
- Kap 9
- Amortisert tid
- Trestrukturer
- Binære ryggsekkproblemet
- Kodingen av en problem instans har mye å si for kompleksiteten av å løse problemet. Kompleksiteten er direkte avhengig av størrelsen på input som igjen avhenger av kodingen av probleminstansen. Ta for eksempel det binære ryggsekkproblemet (se appendiks D). Om vi koder heltall i entallssystemet og ikke totallssystemet, så går kjøretiden fra å være eksponentiell til polynomisk (3, Ø13)
- Kantklassifisering (19,20 ø8)
- Parantesteoremet
- Heuristics to improve the running time (19.3)
- MST-PRIM
- Ø10 opg 12
- Slow, fast asps (opg9 2022h)
- Opg 5, Ø12
- Maskimal flyt
- H2022, 16
- LCS
Spørsmål:
- Hvorfor er top down mer overhead enn bottom up? (Dynamisk programmering)
- Flere funksjonskall (Derav høyere konstant)
- Hvordan lagrer egt bottom up variablene i cut rod? Mtp at vi risikerer å løse samme delproblem flere ganger
Dump kræsjkurs:
- Visualiser oppgavene, tegninger.
- Master teoremet med substitution (, → → )
- Reduser fra et NPC problem til problemet for å bevise NPC. Ikke motsatt
| . | Gjort | Bemerkninger |
|---|---|---|
| 2023k | ||
| 2022h | ||
| 2022k | ||
| 2019h | ||
| 2019k | ||
| 2018h | ||
| 2018k | ||
| 2017h | ||
| 2017k |
Svakheter:
- Fredrik :D
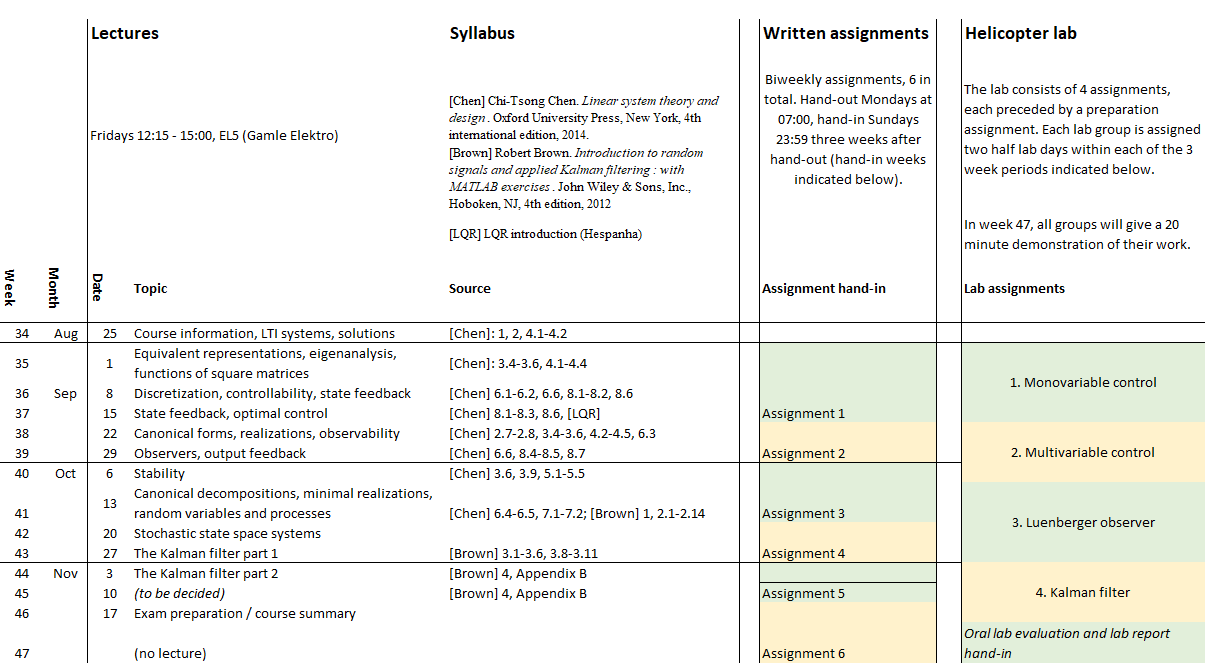
Lineær Systemteori, 19.12.2023
Forelesningsplan: TTK4115_forelesningsplan_h2023.png Pensumoversikt: TTK4115-Pensum Oversikt
{kind=link}
Vanskelig
- Opg1 ø3
- opg5 ø4
- h2021, opg 5b
Pugg:
- Algebraic equivalence Zero-state equivalence
- Minimal Realizations
- A system is a minimal realization if and only if
- A system is a minimal realization if and only if it is controllable and observable.
- Kalman filter
- More noise (higher value or ) gives lower Kalman gain (less emphasis on measurements)
- Stronger disturbance (higher values of ) gives higher Kalman gain (less emphasis on the model)
- Transformation matrices ()
- Diagonal form - ,
- Modal form -
- Integral Effect
- Given this plant$$ \begin{align} \dot{x}&=Ax+Bu+Bw \ y&=Cx \end{align}