Kinematics Lecture Notes.pdf
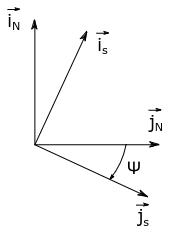
Given the following reference frames (NED-frame and s-frame)
a)
Since we have a rotation with the angle ψ, we can write the new frame as a result of the transformation
isjs=iNcos(ψ)+jNsin(ψ)=jNcos(ψ)−iNsin(ψ)
b)
Given v=ζ1is+ζ2js, we can express this as through the unit vectors of the NED-frame given the expression we found in a)
v↓v=ζ1(iNcosψ+jNsinψ)+ζ2(jNcosψ−iNsinψ)=(ζ1cosψ−ζ2sinψ)iN+(ζ1sinψ+ζ2cosψ)jN
Where χ1=ζ1cosψ−ζ2sinψ and χ2=ζ1sinψ+ζ2cosψ
c)
We find the rotation matrix, RsN(ψ).
RsN(ψ)=[cosψsinψ−sinψcosψ]
Such that vN=[χ1χ2]=RsN(ψ)[ζ1ζ2]=RsN(ψ)vs.
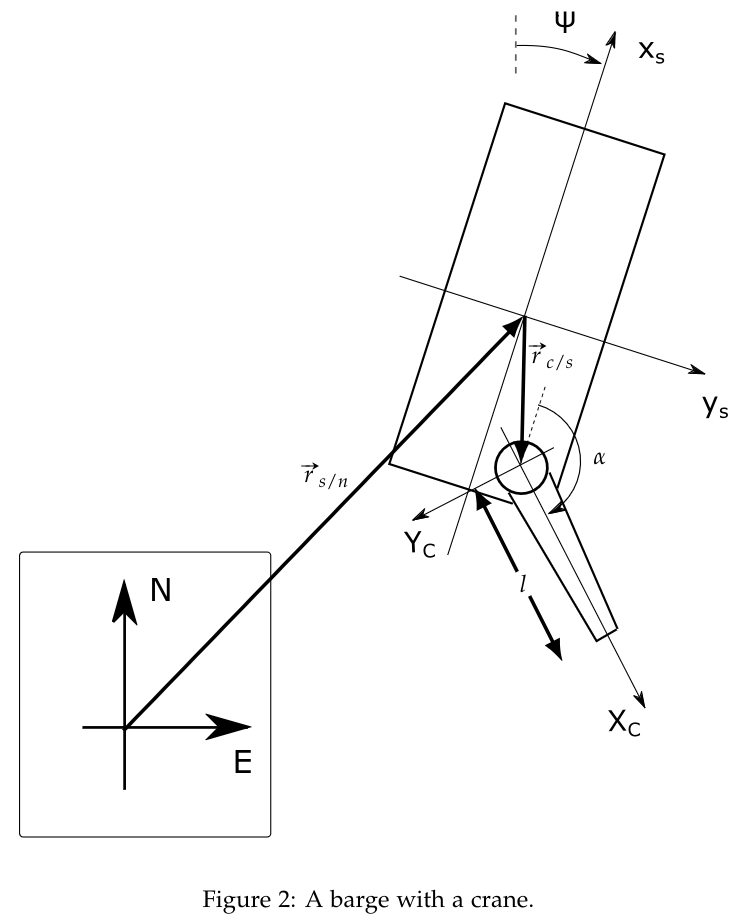
Problem 2 (Barge with a crane)
Given the figure with the following reference frames
 And the location of the origin of the s-frame relative to the origin of the NED-frame is given as
And the location of the origin of the s-frame relative to the origin of the NED-frame is given as
The position of the barge is given as
rc/s=ais+bjs+cks
The angle between the xs-axis and the xc-axis is α, and the distance from the origin of the crane-fixed frame to the tip of the crane is l.
a)
We want to find rs/n expressed in terms of the s-frame.
We know that rs/n=nin+ejn+dkn, and we now need to express in, jn and kn in terms of is, js and ks.
Since we found the rotation matrix in problem 1, we can find the Rotation Transformation
Rsn(ψ)Rns(ψ)=I
Where
Rns(ψ)Rns(ψ)=(Rsn(ψ))T=[cosψ−sinψsinψcosψ]
We can therefore write rs/n as
rs/nsrs/ns=Rns(ψ)rs/nn=cosψ−sinψ0sinψcosψ0001ned=ncosψ+esinψ−nsinψ+ecosψd
b)
The crane reference frame (c-frame) relative to the barge reference frame (s-frame) is given by
rc/s=ais+bjs+cks
We also have a rotation around the z-axis, given by
Rz(α′)=cosα′sinα′0−sinα′cosα′0001
Where α′=α.
The resulting vector from the the origin of the s-frame to the tip of the crane, T, is then
rT/ssrT/ssrT/ssrT/ss=rc/ss+rT/cs=ais+bjs+cks+lRz(α−2π)=abc+cosαsinα0−sinαcosα0001l00=a+lcosαb+lsinαc
c)
We want to find the position of T relative to the n-frame.
rT/nn=rs/nn+rT/sn
Where
rT/snrT/snrT/sn=Rsn(ψ)rT/ss=cosψsinψ0−sinψcosψ0001a+lcosαb+lsinαc=acosψ−bsinψ+lcos(α+ψ)asinψ+bcosψ+lsin(α+ψ)c
Which gives us
rT/nnrT/nn=rs/nn+rT/sn=n+acosψ−bsinψ+lcos(α+ψ)e+asinψ+bcosψ+lsin(α+ψ)d+c
d)
Angular velocity of crane, θ˙, is the sum of all angular velocities.
θ˙=ψ˙+α˙
e)
vs/nn=Rsn(ψ)vs/ns=cosψsinψ0−sinψcosψ0001uv0=ucosψ−vsinψusinψ+vcosψ0
Where n˙=ucosψ−vsinψ, and e˙=usinψ+vcosψ.
f)
vT/nvT/n=dtdrT/n=dtd(rs/n+rc/s+rT/c)=vs/n+ωs/n×rc/s+ωc/n×rT/c
Where
vs/nn=ucosψ−vsinψusinψ+vcosψ0,ωs/ns=00ψ˙,rc/ss=abc
We first calculate ωs/n×rc/s
ωs/n×rc/s=is0ajs0bksψ˙c=−ψ˙bis+ψ˙ajs
Then we calculate ωc/n×rT/c
ωc/n×rT/c=ic01jc00kcα˙0=α˙ljc
To calculate vT/nn we can solve
vT/nn=vs/nn+Rsn(ψ)(ωs/ns×rc/ss)+Rsn(ψ)Rcs(α)(ωc/nc×rT/cc)
Where
Rsn(ψ)Rcs(α)=cosψsinψ0−sinψcosψ0001=cosαsinα0−sinαcosα0001
This gives us
vT/nn=ucosψ−vsinψ−ψ˙bcosψ−ψ˙asinψ−α˙lsin(α+ψ)usinψ+vcosψ−ψ˙bsinψ+ψ˙acosψ+α˙lcos(α+ψ)0
{kind=link}