{kind=link}
When going from one Reference Frame to another, and the relation between them is just a rotation.
This relation can be written as
Where is a Rotation Matrix
Example
Given the following frames
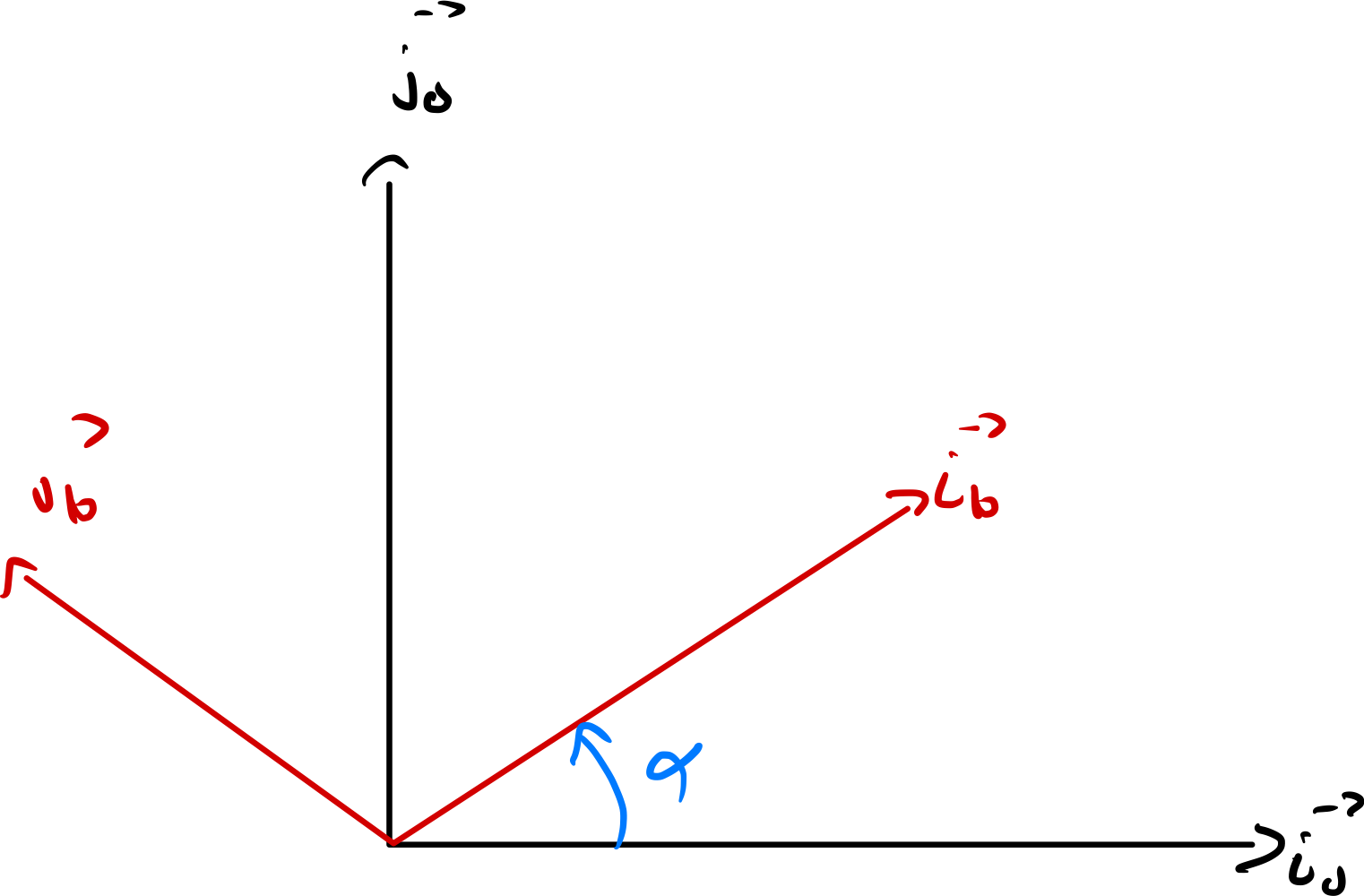 We want to find a vector
We want to find a vector
This can be done by finding as a function of
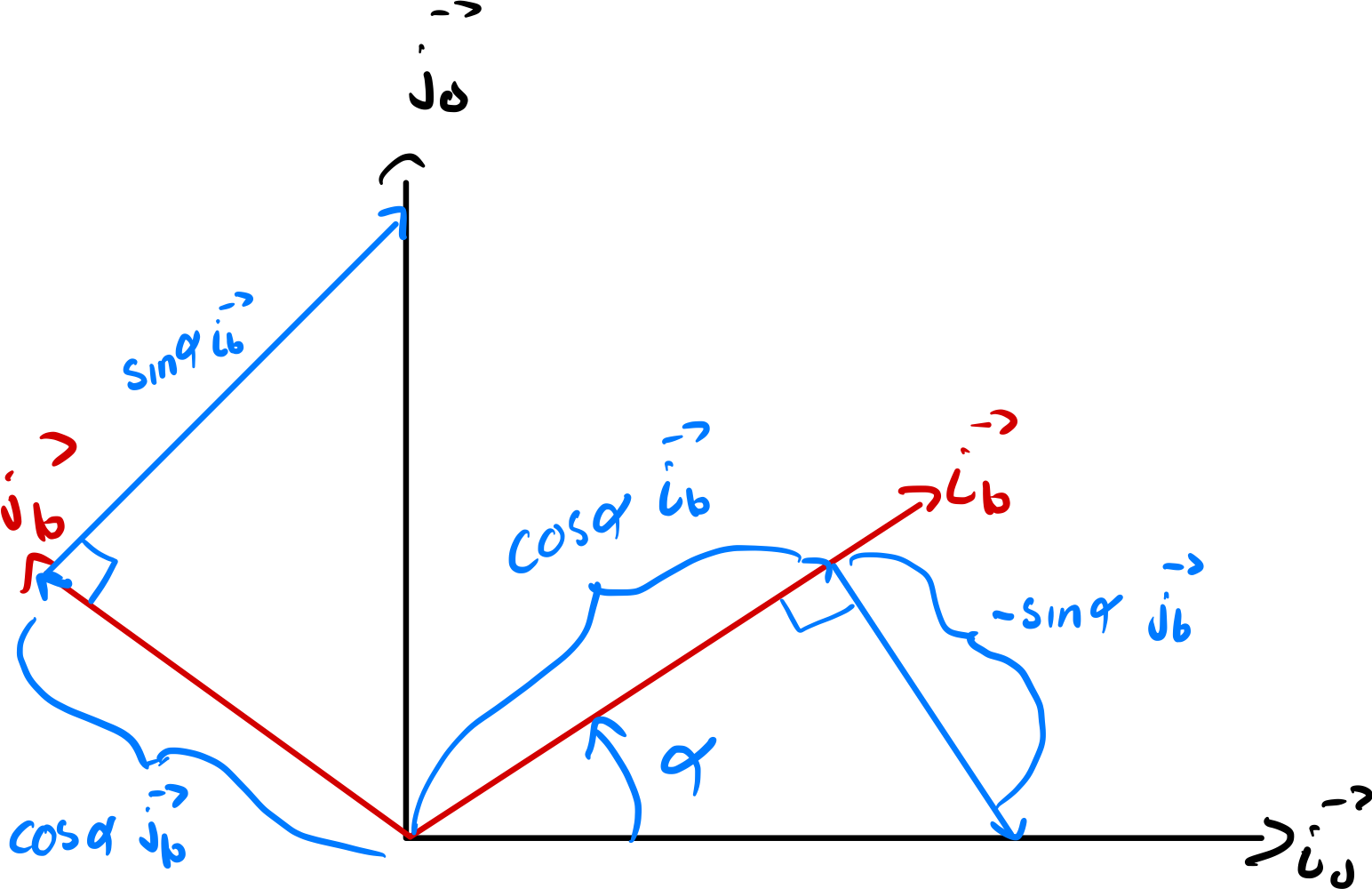
Giving us the new value of
Where
Written more formally,
Which is a Principal Rotation Matrix about the z-axis.