{kind=link}
 Which has the following State Space Representation:
Which has the following State Space Representation:
 Where is torque
Where is torque
Example With Numbers
Given
Where is the time constant, is the intertia, and is usually unknown
Gives us , marginally stable
We use an observer model where , even though this is wrong, the observer will make up for it.
We have three different cases, depending on how many states we are measuring:
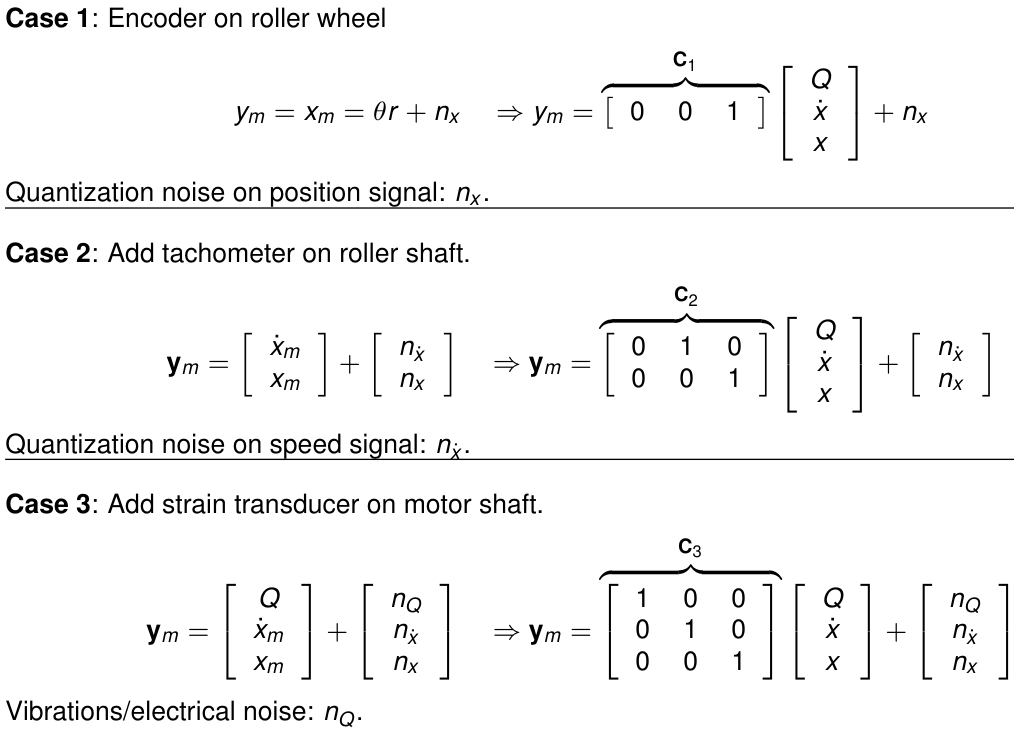 Every case here is observeable
Every case here is observeable
Case 3
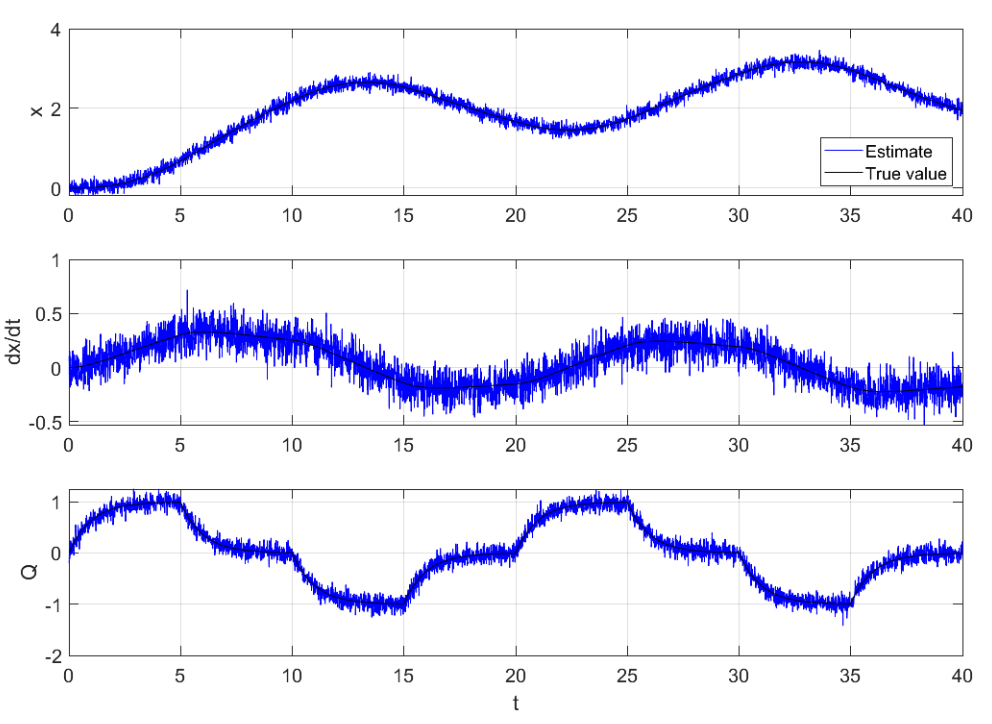
Using Measurement Equation Inversion:
With :
And the error will be:
Which yields the following results
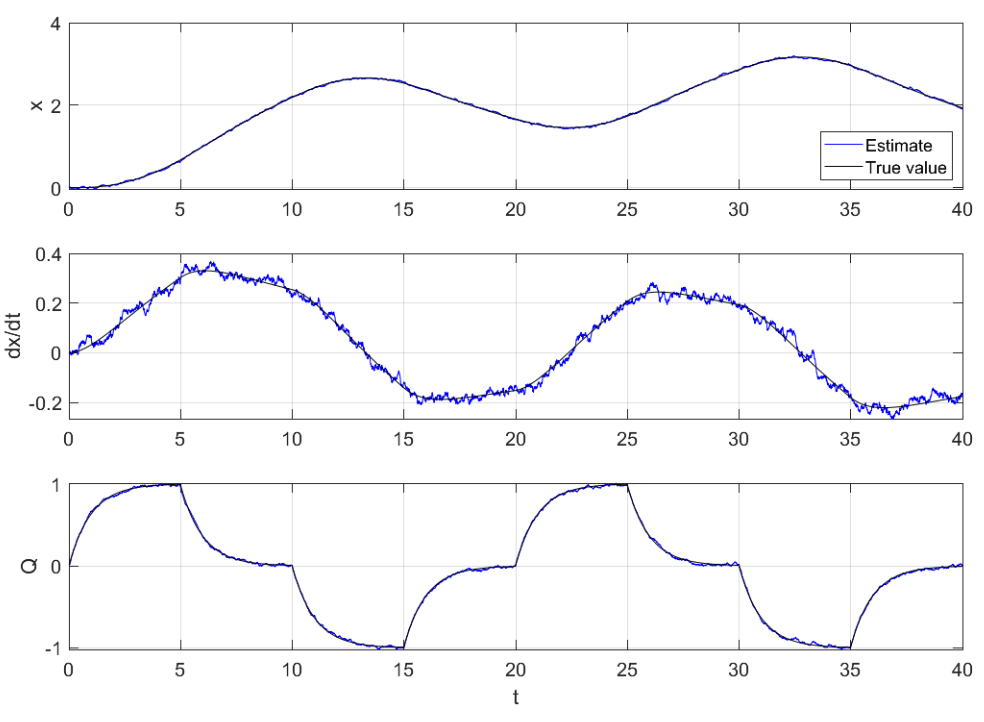
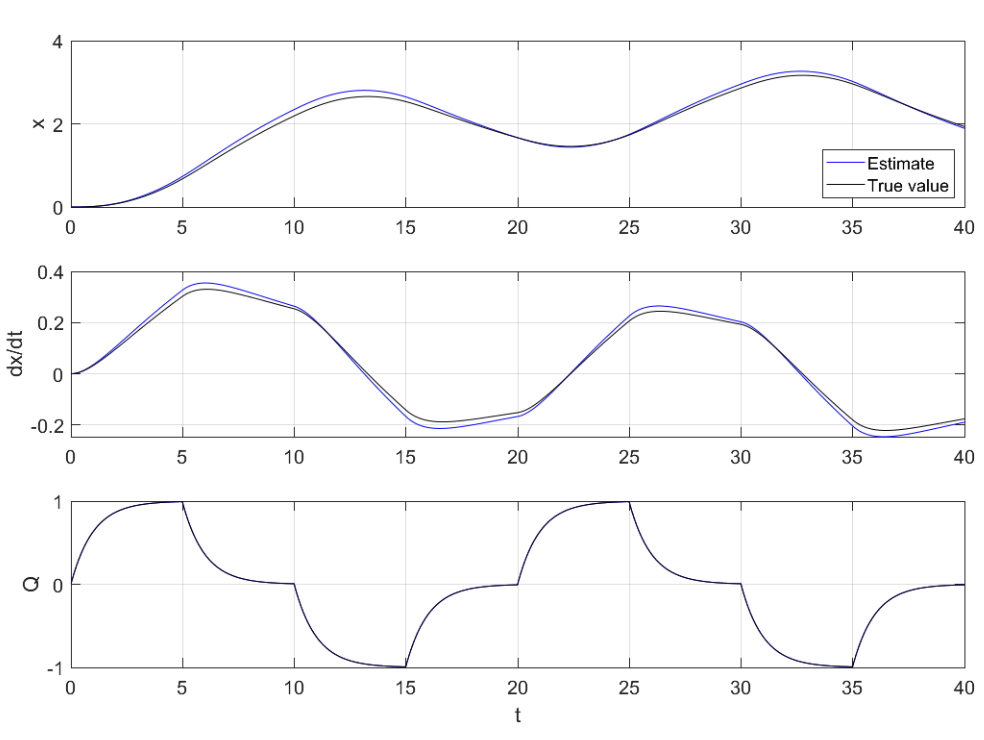
Using Open-loop Estimator, yields following results
Using Closed-loop Estimator - Luenberger Observer, yields following results