{kind=link}
Rotation
The rotation matrix between frame and is the coordinate from to , the opposite of what one might think.
Vectors
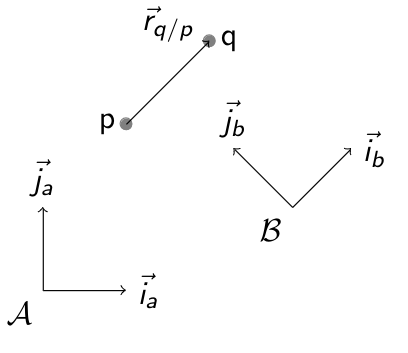
Vector from to
Vector from to express in frame
Common mistakes
Arithmetic on coordinate vectors expressed in different frames
Search
Jan 06, 2025, 1 min read
The rotation matrix between frame A and B is the coordinate from B to A, the opposite of what one might think.
vA=RBAvBVector from p to q
rq/pVector from p to q express in A frame
rq/pA
Arithmetic on coordinate vectors expressed in different frames
vA+uBvA×uB