{kind=link}
Given the following second-order system
In continuous State Space Representation form, with and we get
In discrete form using Euler Discretization
We set and with initial condition , and the initial state estimate is when an observer is used
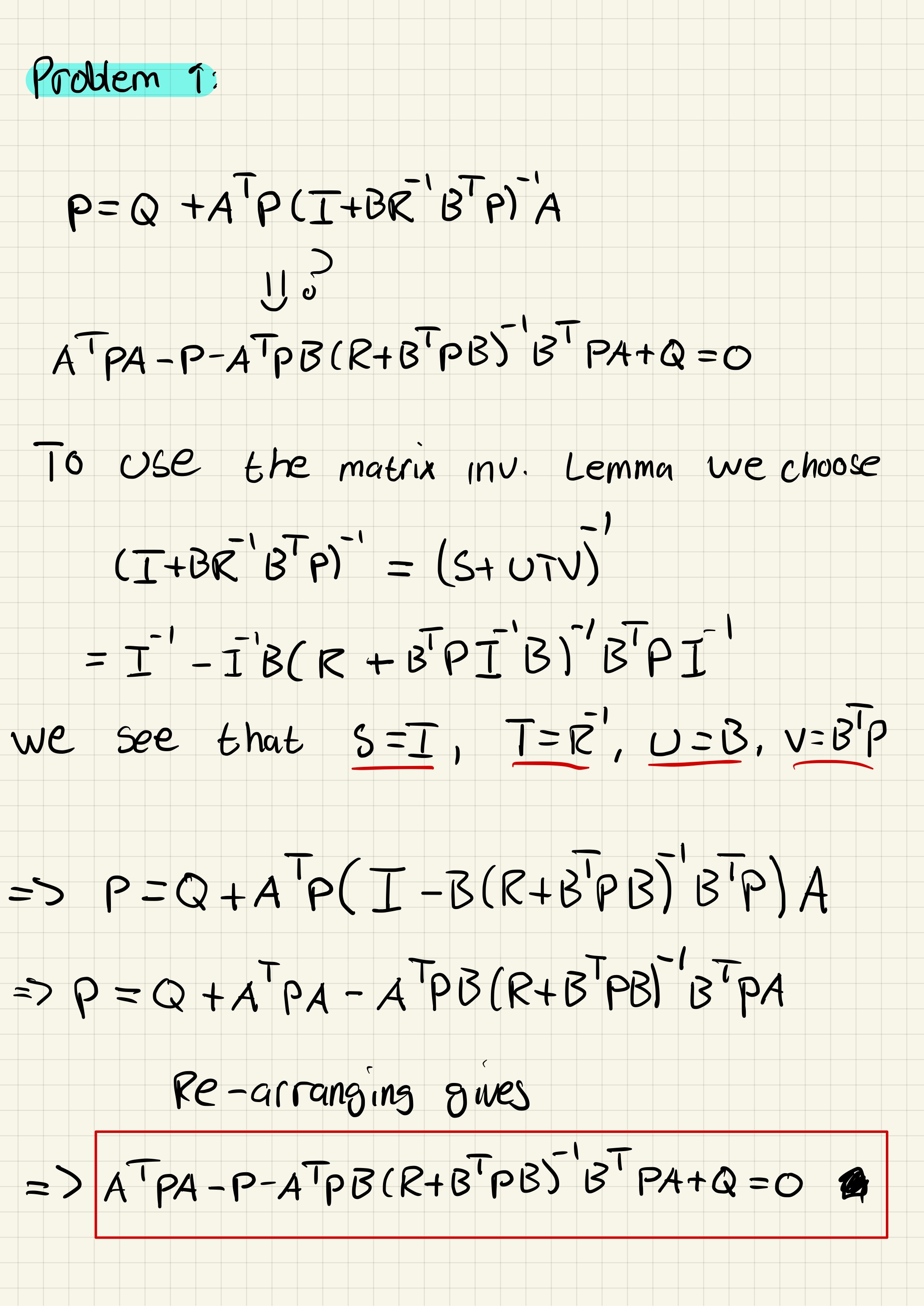
Problem 1 (20%) The Riccati Equation
Matrix Inversion Lemma
Link to original
Problem 2 (30%) LQR and State Estimation
We only measure
And we use LQR and an observer to control the output.
a)
The following Matlab script find the optimal feedback gain assuming that the full state is available for feedback
Plot
% Adjust the time vector to exactly match the state vectors' length
time_vector = 0:final_time;
% Ensure the plot commands only include vectors of the same length
% Since x and x_hat include the initial state, we plot them directly against the time vector
% Plotting
figure;
% Plot actual state x
subplot(2,1,1); % Create subplot for the first state
plot(time_vector, x(1,:), 'b-', 'LineWidth', 2); hold on; % Plot first state over time
plot(time_vector, x_hat(1,:), 'r--', 'LineWidth', 2); hold off; % Plot first estimated state over time
ylabel('State x_1 and x̂_1');
legend('Actual State x_1', 'Estimated State x̂_1');
title('State x_1 and its estimate over time');
subplot(2,1,2); % Create subplot for the second state
plot(time_vector, x(2,:), 'b-', 'LineWidth', 2); hold on; % Plot second state over time
plot(time_vector, x_hat(2,:), 'r--', 'LineWidth', 2); hold off; % Plot second estimated state over time
ylabel('State x_2 and x̂_2');
legend('Actual State x_2', 'Estimated State x̂_2');
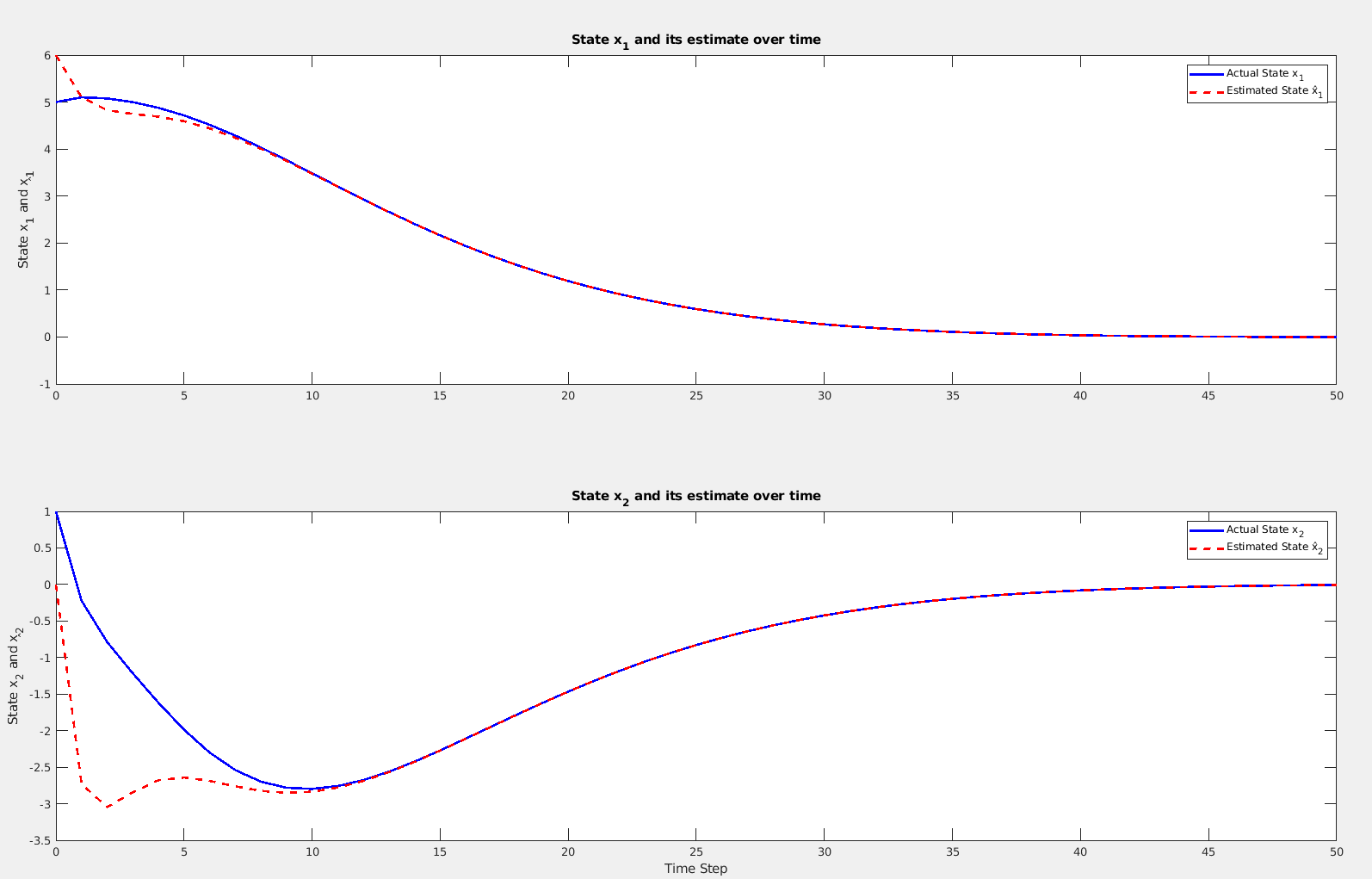
title('State x_2 and its estimate over time');
xlabel('Time Step');Gave me this figure
c)
The following
phi = [A-B*K B*K;
zeros(size(A)) A-K_F*C];
eig(phi)Gave me the eigenvalues
ans =
0.8675 + 0.0531i
0.8675 - 0.0531i
0.5000 + 0.0300i
0.5000 - 0.0300iWhich is the eigenvalues of both the system in closed loop, and the observer.
Problem 3 (30%) MPC and State Estimation
We now add the input constraint
And use MPC with
a)
Problem 4 (20%) Infinite-Horizon MPC
I realize that this might not be enough to get the assignment approved, but I was pretty demotivated to do all of this Matlab scripting in one assignment.