{kind=link}
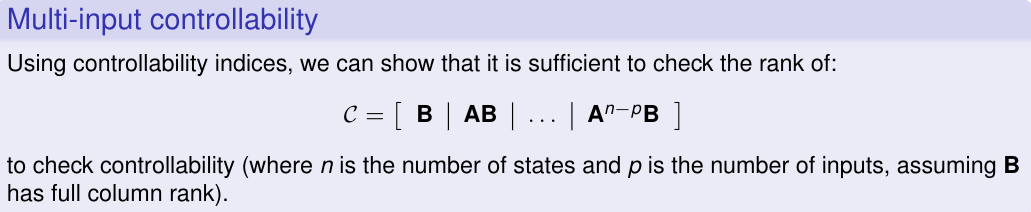
If the matrix has several columns (p), we have several inputs. Therefore the Controllability Matrix can be written as
Search
Jan 06, 2025, 1 min read
If the B matrix has several columns (p), we have several inputs. Therefore the Controllability Matrix can be written as