{kind=link}
Reference Frame Rotation Transformation Principal Rotation Matrix
Mobile Crane Example
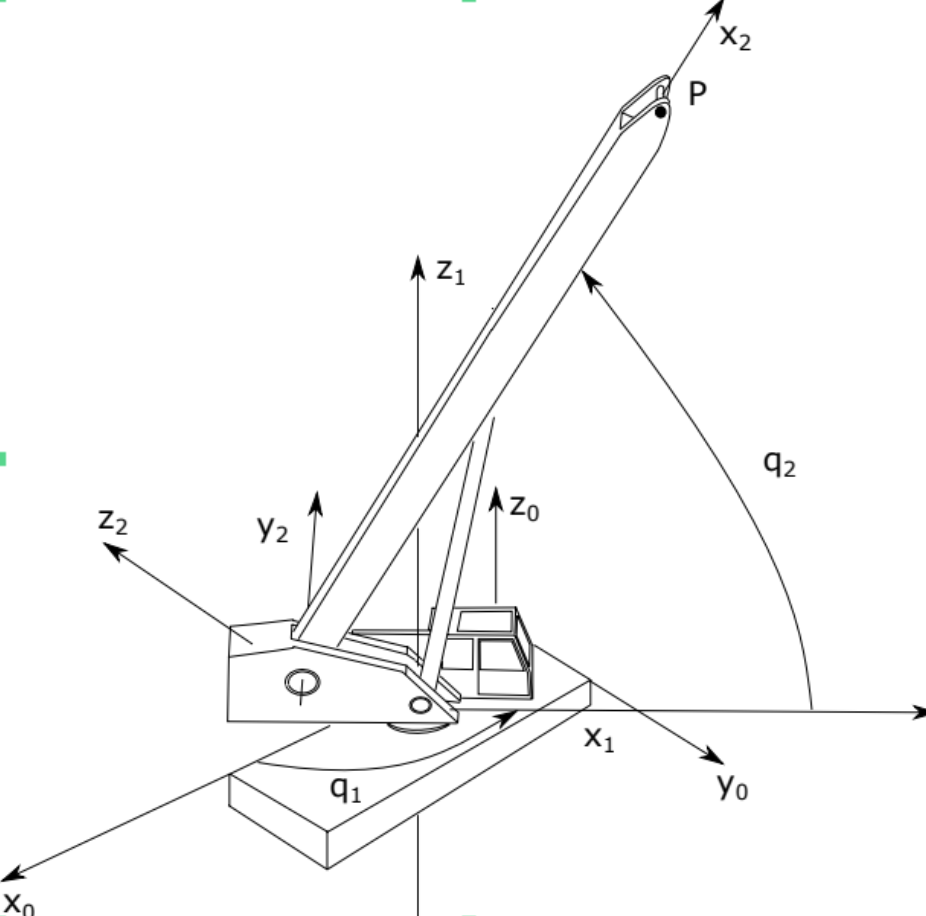 Goal: Express the position at the tip of the crane relative to the point 0 (Origo in the 0-Frame).
Goal: Express the position at the tip of the crane relative to the point 0 (Origo in the 0-Frame).
This vector can be written as
Where is based on the 0-frame (), etc…
We must now find represented in the 0-frame () instead of the 1-frame (), same for the third vector.
Remember Principal Rotation Matrix
And