{kind=link}
Resources: page=680
Ideal filters are non-causal and infinite lasting. Example with an ideal low pass filter:
\usepackage{pgfplots}
\pgfplotsset{compat=1.16}
\begin{document}
\begin{tikzpicture}
\begin{axis}
[
ymax = 0.3,
clip = false,
ycomb,
axis lines = middle,
xlabel = $n$,
ylabel = {h[n]},
title = {Ideal discrete low pass filter}
]
\addplot
[
color = red,
samples=50,
domain=-20:20,
mark=o,
]{pi/4/pi*(sin(deg(pi/4*x)))/(pi/4*x)}
node[right, pos=1]{$f(x)=pi/4/pi*(sin(deg(pi/4*x)))/(pi/4*x)$};
\end{axis}
\end{tikzpicture}
\end{document}We want causal linear-phase filters which needs approximations. The filter must not “spill” into the next frequency band.
FIR vs IIR
FIR:
- Always stable
- Can achieve exactly Linear Phase
- Easily designed with linear methods
- Easy to implement
IIR:
- Fewer parameters (low filter order)
- Less memory
- Low delay
- Lower computational complexity
- Typically designed by transforming an analog filter design
FIR
Goal - Find : →
Design Using Windows
Using this method, we begin with the desired frequency response specification, , and then determine the corresponding unit sample response .
We are looking at Finite Impulse Response, therefore we look at . This can we done with a window function like this
And looking at the Fourier transform gives us
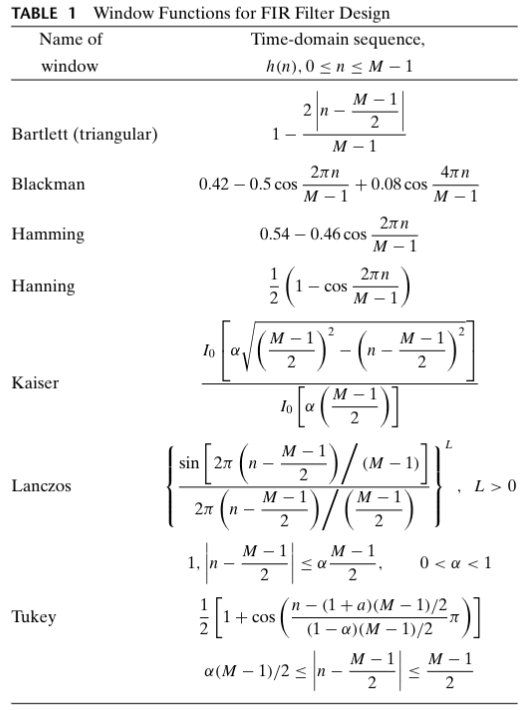
We also have tons of other window functions
IIR
Goal - Find and : →
\usepackage{pgfplots}
\pgfplotsset{compat=1.16}
\begin{document}
\begin{tikzpicture}
\begin{axis}
[
clip = false,
axis lines = middle,
xlabel = $x$,
ylabel = $y$,
title = {edvard er homo}
]
\addplot
[
color = blue,
samples=50,
domain=-2:2,
]{x²}
node[right, pos=1]{$f(x)=x²$};
\end{axis}
\end{tikzpicture}
\end{document}