{kind=link}
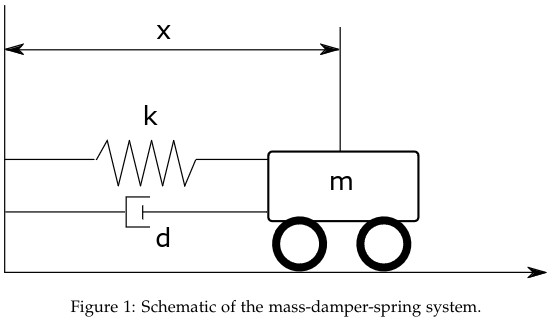
Problem 1 (Mass-damper-spring system)
 a)
From Hooke’s law we know that the spring force is . We also know that the damping force is given by . We therefore get.
a)
From Hooke’s law we know that the spring force is . We also know that the damping force is given by . We therefore get.
b) We set and . We therefore get the following State Space Representation model.
c)
import numpy as np
import matplotlib.pyplot as plt
# Constants
m = 1
k = 1
d = 0.7
init_x1 = 1 # initial position
init_x2 = 0 # initial velocity
# Simulation parameters
dt = 0.01
t_0 = 0
t_f = 60
num_steps = int((t_f - t_0) / dt)
def euler_forward_integration_method(x_1, x_2, dt):
time_steps = [t_0]
x_1_values = [init_x1]
x_2_values = [init_x2]
j=0
while time_steps[j] <= t_f:
# Calculate x_2
dot_x_2 = -k/m * x_1 - d/m * x_2
x_2 = x_2 + dot_x_2 * dt
# Calculate x_1
dot_x_1 = x_2
x_1 = x_1 + dot_x_1 * dt
# Append values to lists
time_steps.append(time_steps[j] + dt)
x_1_values.append(x_1)
x_2_values.append(x_2)
j += 1
return time_steps, x_1_values, x_2_values
def main():
# Euler Forward Integration Method
time_steps, x_1_values, x_2_values = euler_forward_integration_method(init_x1, init_x2, dt)
# Plot
plt.plot(time_steps, x_1_values)
plt.plot(time_steps, x_2_values)
plt.xlabel("Time (s)")
plt.ylabel("Position (m)")
plt.title("Euler Forward Integration Method")
plt.legend(["Position", "Velocity"])
plt.show()
if __name__ == "__main__":
main()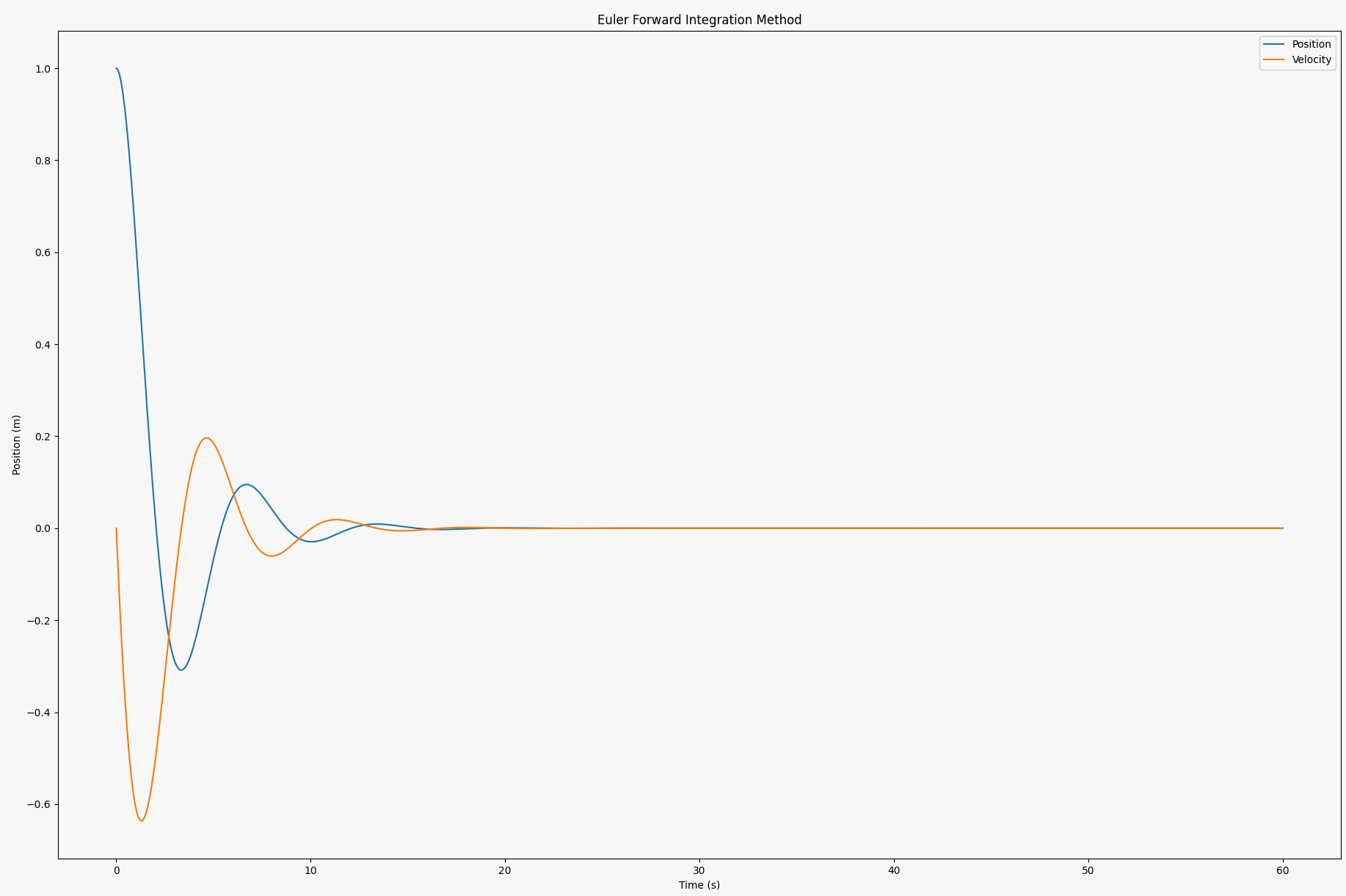
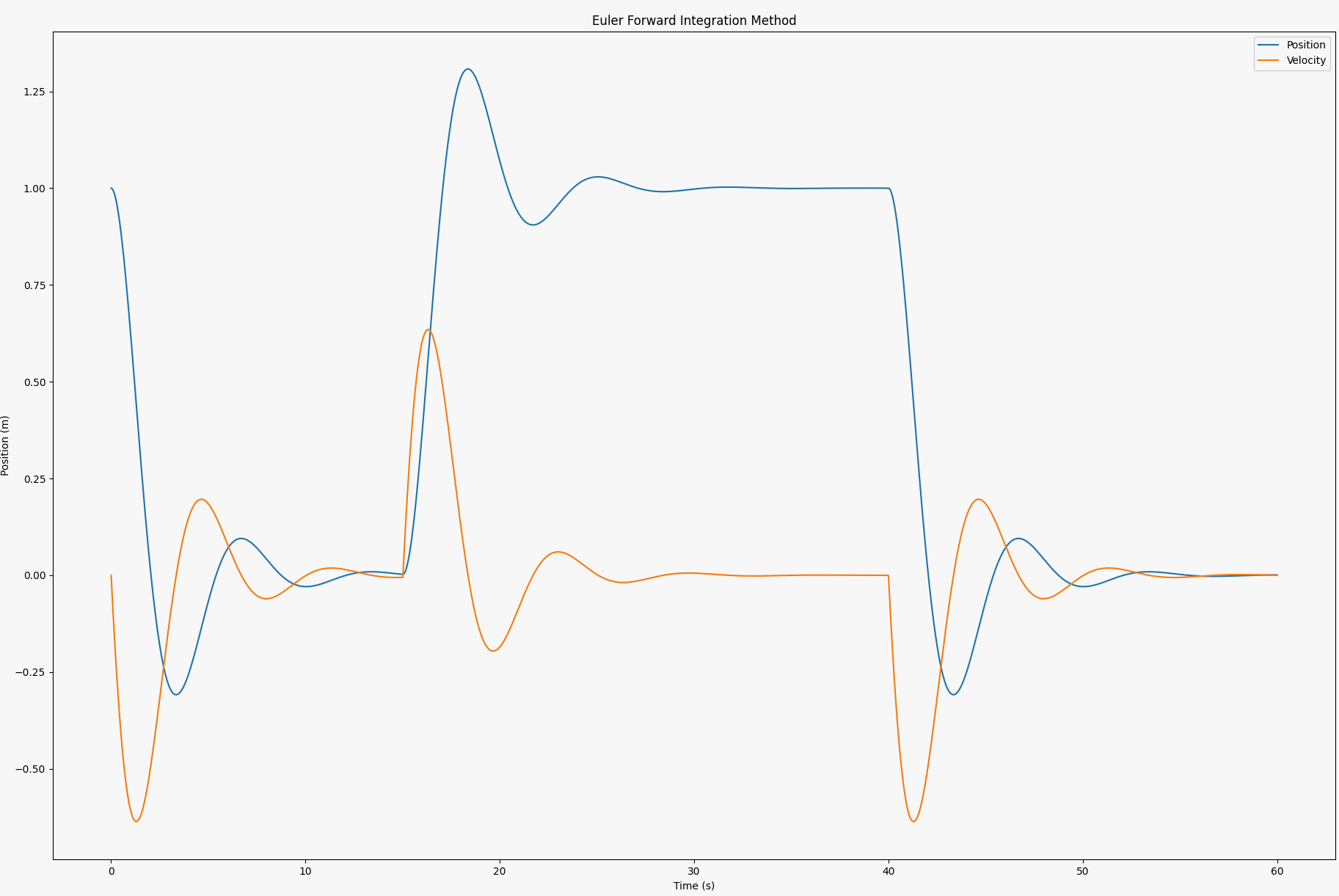
d) The expression where an outside force is acting on the wagon is given by
By adding the following code block in the while loop, we can find the inhomogeneous solution.
#...Previous code
# Calculate F
if time_steps[j] >= 15 and time_steps[j] <= 40:
F = 1
else:
F = 0
# Calculate x_2
dot_x_2 = -k/m * x_1 - d/m * x_2 + F/m
#...Rest of codeWhich gives this response