{kind=link}
Resources: F&H Ch. 4.1, 4.2
A way to control a process while satisfying the set of constraint. A model of the process is used to compute the control signals (inputs) that optimize predicted future process behavior.
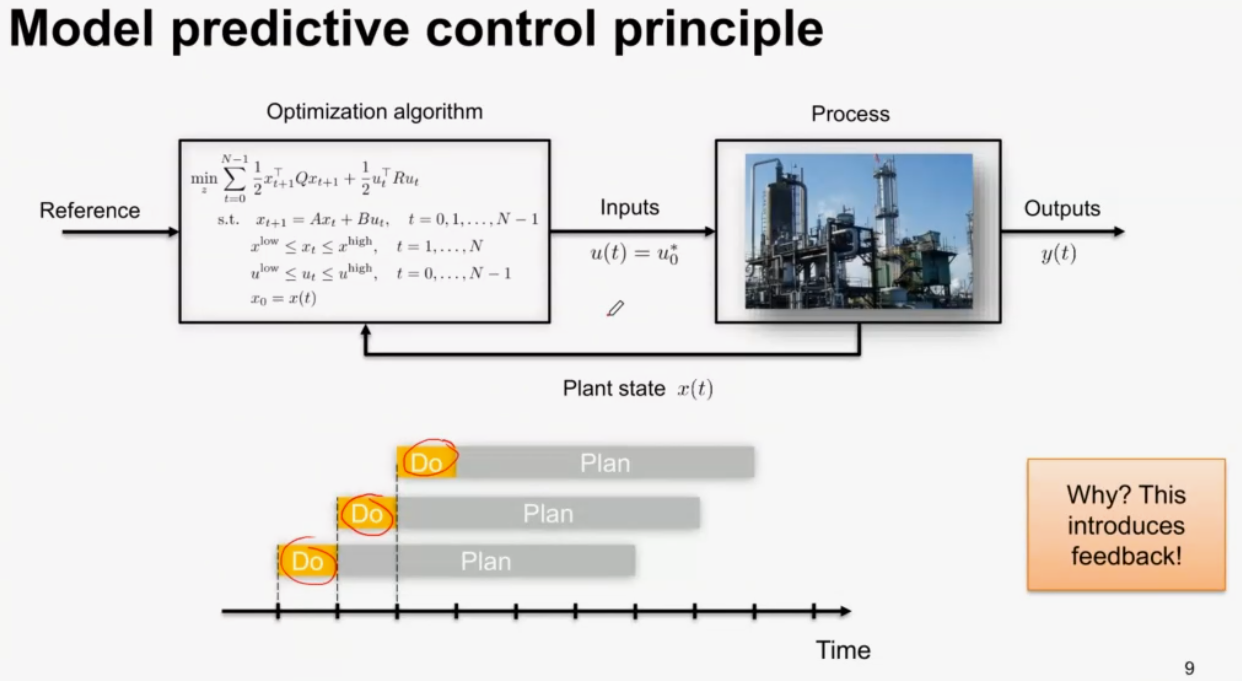 We set , which is our feedback. This is the reason our process looks like it does in the graph.
We set , which is our feedback. This is the reason our process looks like it does in the graph.
If the QP is infeasible, we solve this by adding a slack variable
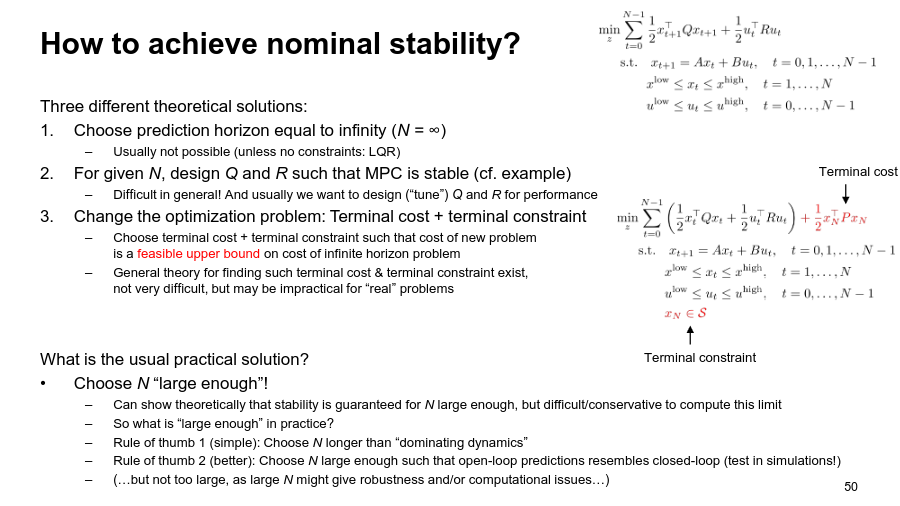
Is MPC Always Stable?
We know that Infinite Horizon LQR is always stable, but what about finite MPC? Not always. It depends on the weight matrices, and the horizon.
How to Achieve Nominal Stability
There are 3 main theoretical ways, and one way we usually do in practice.
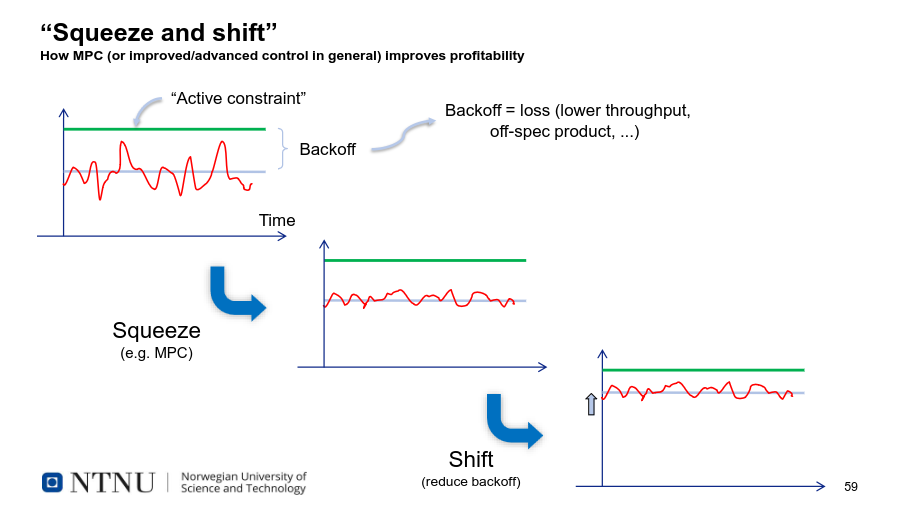
Squeeze and Shift
Terms
Horizon Nominal Stability Robust Stability
Questions
Why do we look so far into the future?
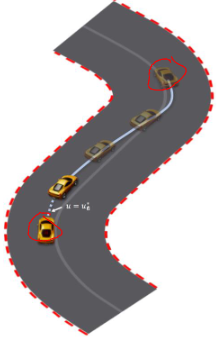 This car example explains this well. To do the turn properly, you might need to plan ahead.
This car example explains this well. To do the turn properly, you might need to plan ahead.
A Good Analogy