{kind=link}
The separation principle tells us that the overall loop is stable if the state-feedback and observer are individually stable.
However, it rarely works in a practical system (why?).
Definitions
Certainty Equivalence
If the full state is not available for feedback, one can use the estimate . The estimate is generated from the output , thus giving it the name output feedback.
Link to original
In most real words cases we don’t have access to all states.Output feedback controller
The feedback no longer consists of a simple constant matrix , but is in fact a dynamic system of its own. This adds complexity.
Link to original
Formulas
Given a general State Space Representation where
Link to originalAnd an observer
Link to originalAnd , where
This gives us the estimate update equation
This can be represented through the following block diagram
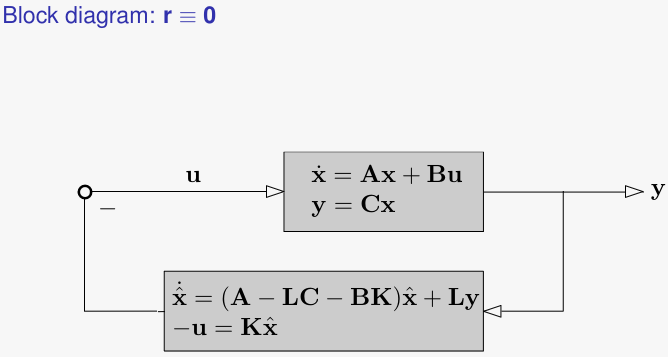 And we can write the closed-loop dynamics as
And we can write the closed-loop dynamics as
IMPORTANT TO NOTE: Since it is a triangular matrix, the eigenvalues of the system is the union of the eigenvalues of and .