{kind=link}
TTK4135 - Optimalisering og regulering
Problem 1 (25%)
Given the following problem
 a)
By inspection, we can see that the optimal point is given by
a)
By inspection, we can see that the optimal point is given by
Since we need to find the minimal point on a circle, where must be greater than zero.
b) From the definition of the Lagrangian we know that it is given by
Link to originalFor this problem it is therefore given by (where , and )
From the KKT (Karush–Kuhn–Tucker) Conditions, we find
For , we get . Since the KKT conditions are satisfied at this optimal point.
c) We calculate the gradients of the constrains and the objective function at the solution
 d)
According to the KKT (Karush–Kuhn–Tucker) Conditions we need the Lagrange multipliers to be positive to satisfy the KKT conditions.
d)
According to the KKT (Karush–Kuhn–Tucker) Conditions we need the Lagrange multipliers to be positive to satisfy the KKT conditions.
The complementary condition is also called complementary slackness.
Link to original
- The objective function is convex since it is a linear function
- The feasible set is convex it is concave Since both the objective function and the feasible set is convex, this is a convex problem.
Problem 2 (30%)
Given the following problem
Where
a) From the constraint we can see that the feasible set for this problem is the boundary of a circle of radius centered at the origin.
Finding the extreme points means finding when .
Combining this with we solve the system of equations and get the following extreme points
b) From the KKT conditions
We only need to check the second condition in this case.The complementary condition is also called complementary slackness.
Link to original
Meaning that the KKT conditions at these points are satisfied.
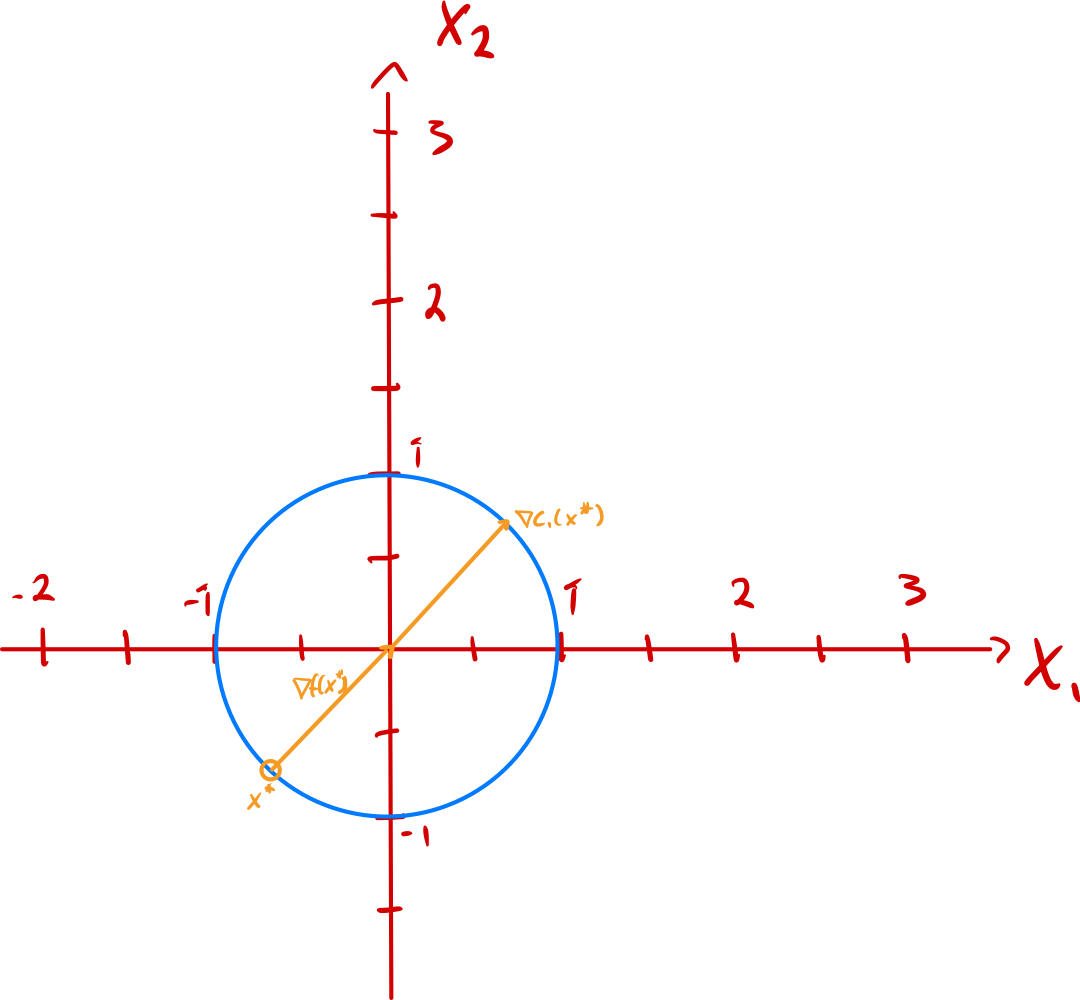
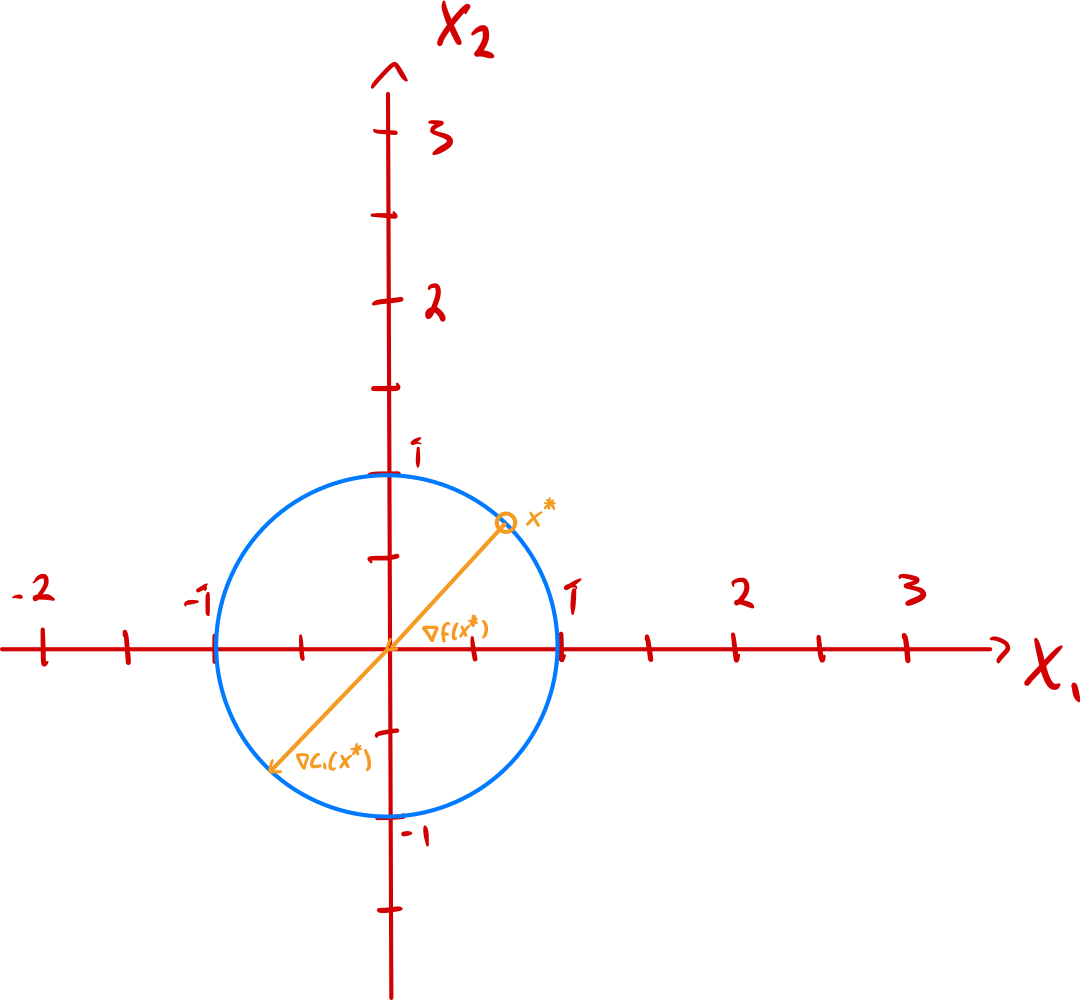
c) Calculating the gradients gives us
and
Which gives us this for the lower point
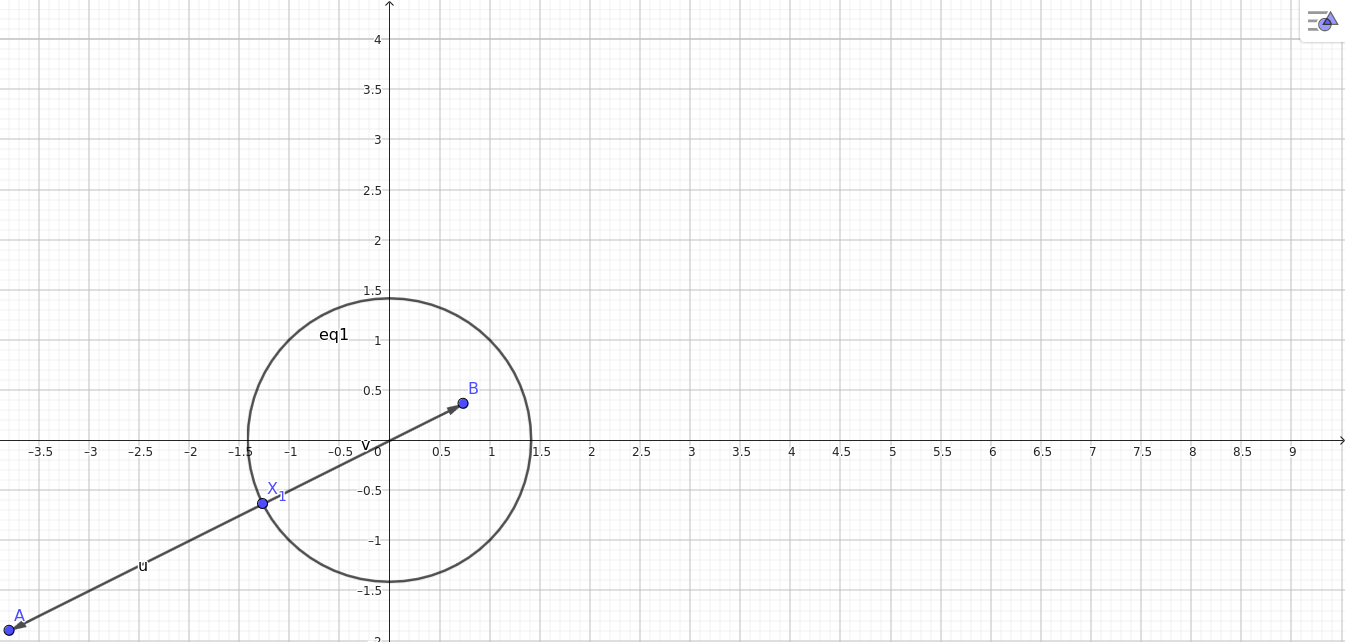 Similar results for the other extreme point, but i didn’t plot it.
Similar results for the other extreme point, but i didn’t plot it.
d) This was calculated in a)
e) We find the second order derivative of the Lagrangian
Since this holds (though only for ), then it follows that
Also holds for all , meaning that is a strict local solution. (Theorem 12.6).
f) The feasible set is not convex since the equality constraint is not linear. The problem is therefore also not convex.
Problem 3 (20%) - 12.19
Consider the optimization problem
The optimal solution is , where both constraints are active.
a) Linear Independence Constraint Qualification] The gradients of the active constraints that are active at the optimal solution are
Since the vectors are linearly independent, LICQ holds.
b) We find the gradient of the Lagrangian
Setting it equal to zero gives us the solution for
From the KKT conditions, we can see that they are all satisfied.
The complementary condition is also called complementary slackness.
Link to original
c) We want to find The Set of Linearized Feasible Directions, , , and the Critical Cone, , at the optimum, and .
We first find from the definition
Link to originalSince we have two inequality constraint, where both are active, and no equality constraints we get . We get the following set of equations for finding
We set
Meaning that
Secondly we find from the definition
Link to originalWe already know , and , giving us and almost identical set of equations as when finding (since )
Giving us . The critical cone is therefore
d)
-
The Second-Order Necessary Conditions (SONC) is given by
Link to original
Since we found to be in the last task, this condition is satisified -
The Second-Order Sufficient Condition (SOSC) is given by
We have already found that these satisfy the KKT (Karush–Kuhn–Tucker) Conditions. Since , but this condition does not consider the case where . Therefore the SOSC is satisfied, and we have a strict local solution.Second-Order Sufficient Condition (SOSC)
Suppose that for some feasible point there is a Lagrange multiplier vector such that the KKT (Karush–Kuhn–Tucker) Conditions are satisfied. Suppose also that
Then is a strict local solution.
Link to original
Problem 4 (25%) - 12.21
This can be rewritten into
We first find the Lagrangian
And the gradient of the Lagrangian is given by
We then solve and find a non zero (KKT (Karush–Kuhn–Tucker) Conditions).
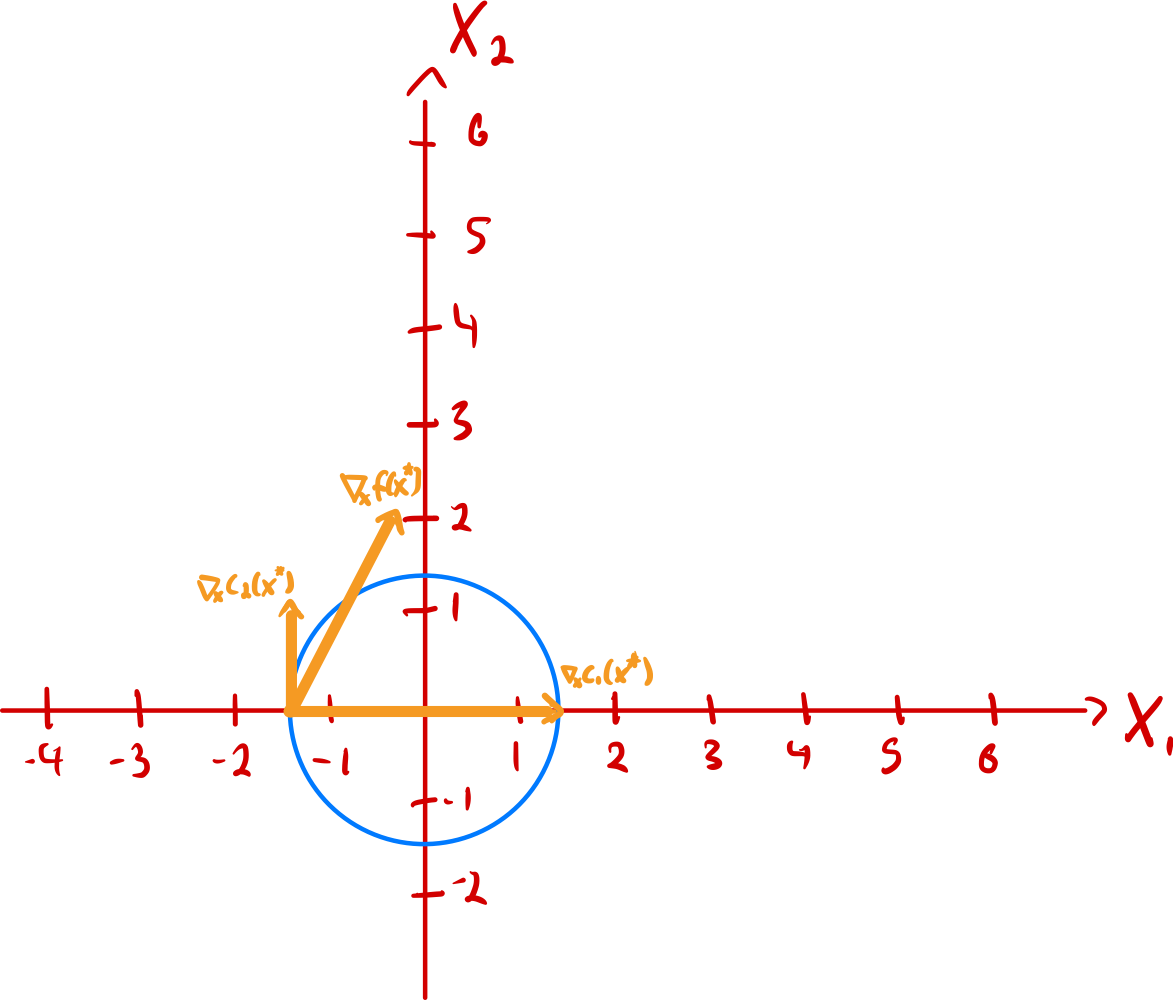
Giving us . This, in turn gives us
Aka the optimal points are
Illustrating the gradients gives us the following plots for and respectively.