{kind=link}
Problem 1
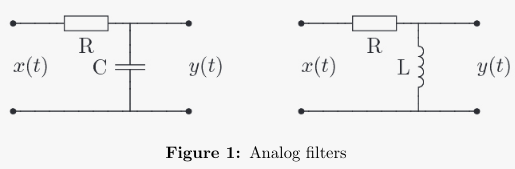
a) For the capacitor filter, we have the following equation:
Where , which gives us:
And we can find the transfer function by finding
x(t) = RC \frac{dy(t)}{d} + y(t) &\xrightarrow{\mathcal{L}} X(s) = RC*sY(s)+Y(s) \\ H(s) &= \frac{Y(s)}{X(s)}=\frac{1}{RCs+1} \end{align}For the induction filter, we have the following equation:
where , which gives us:
x(t) &= Ri + L \frac{di(t)}{dt} \\ \dot{x}(t) &= R \dot{i}(t) + \dot{y}(t) \\ \dot{x}(t) &= \frac{R}{L}y(t) + \dot{y}(t) \\ \end{align}And we can find the transfer function by finding :
\mathcal{L}[\dot{x}(t)] &= X(s) = \frac{R}{L}Y(s)+sY(s) \\ H(s) = \frac{Y(s)}{X(s)} = \frac{s}{s+\frac{R}{L}} \end{align}b) The frequency response for the RL filter is given by:
And the magnitude response of the RL filter is given by:
We can determine the filter characteristics by:
Which means that the RL filter is a high pass filter
The frequency response for the RC filter is given by:
And the magnitude response of the RL filter is given by:
We can determine the filter characteristics by:
Which means that the RC filter is a low pass filter
c) We can rewrite our expression for the RC filter and get:
and since we know that , then:
which is the unit pulse response for the RC filter
Same logic for the RL filter
which gives us:
which is the unit pulse response for the RL filter
Problem 2
Region of Convergence
If a system is causal, the ROC is defined as , where is the pole with the largest magnitude
If a system anti-causal, the ROC is defined as , where is the pole with the smallest magnitude
Link to original
(page=163)
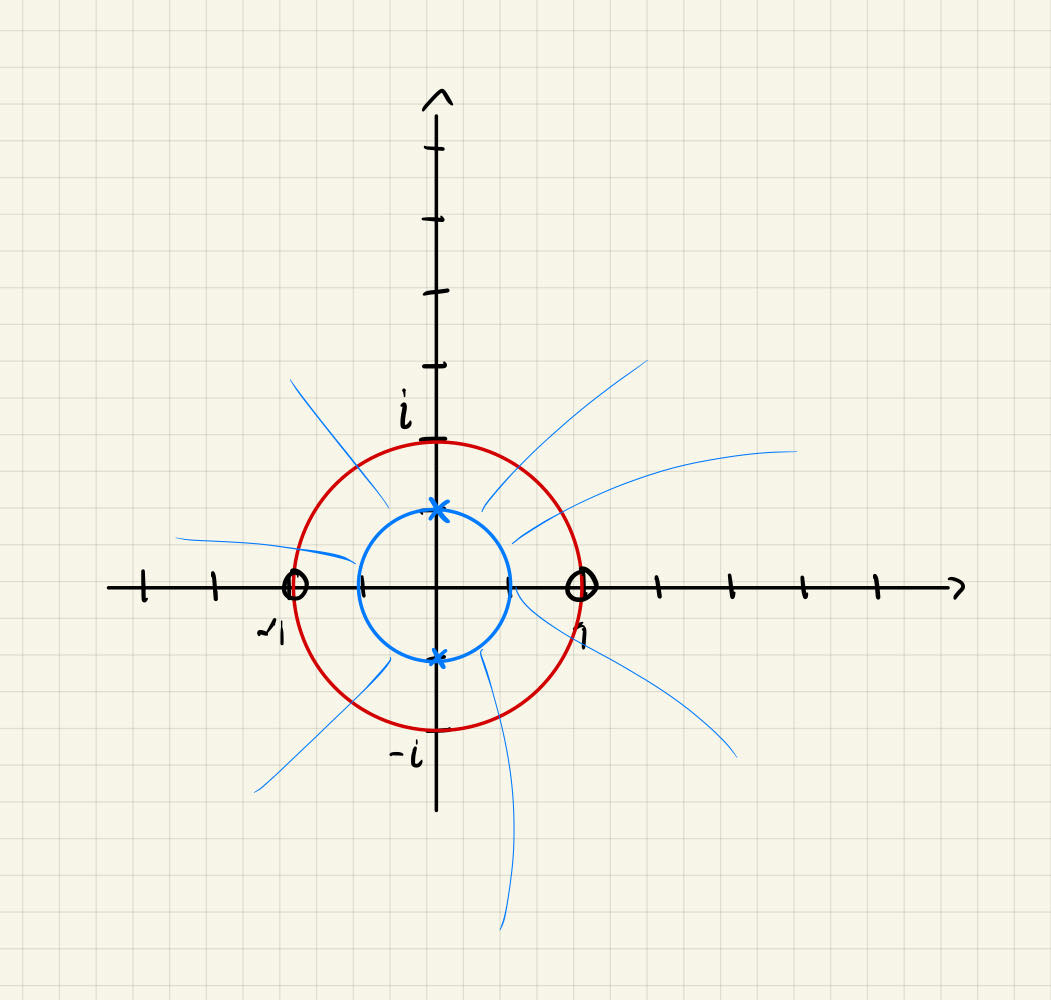
a) Since the filter is causal, and the largest pole is , the ROC and unit pulse reponse is given by: ROC:
b) Since the filter is causal, and the largest pole is , the ROC and unit pulse reponse is given by: ROC:
h_{2}[n] &= \mathcal{Z}^{-1} \left( \frac{1}{\left( 1+\frac{1}{2}z^{-1} \right)(1-z^{-1})} \right) \\ h_{2}[n] &= \mathcal{Z}^{-1} \left( \frac{\frac{1}{3}}{1+\frac{1}{2}z^{-1}}+\frac{\frac{2}{3}}{1-z^{-1}} \right) \\ h_{2}[n] &= \left( \frac{1}{3}\left( -\frac{1}{2} \right)^n + \frac{2}{3} \right)u(n) \end{align}Solved step 1 2 using WolframAlpha
c) Since the filter is anti causal, and the smallest pole is at , the ROC and unit pulse response is given by: ROC:
h_{3}[n] &= \mathcal{Z}^{-1}\left( \frac{z^{-1}}{\left( 1+\frac{3}{2}z^{-1} \right)(1-3z^{-1})} \right) \\ h_{3}[n] &= \mathcal{Z}^{-1}\left( \frac{-\frac{2}{9}}{1+\frac{3}{2}z^{-1}} + + \frac{\frac{2}{9}}{1-3z^{-1}}\right) \\ h_{3}[n] &= \left( \frac{2}{9}*\left( -\frac{3}{2} \right)^n -\frac{2}{9}3^n \right)u(-n-1) \end{align}Also used wolframalpha here.
d) A system is stable if the ROC contains the unit circle filter and are stable
Problem 3
The following is important for this problem
Geometric series
Infinite geometric series
for
Finite geometric series
Link to original
a)
H(z) &= \sum_{n=-\infty}^{\infty}h[n]z^{-n} \\ &= \sum_{n=0}^{\infty} \frac{1}{2^n}z^{-n} \\ &= \sum_{n=0}^{\infty} \left( \frac{z^{-1}}{2} \right)^n \\ &= \frac{1}{1-\frac{1}{2}z^{-1}} \end{align}for , and
X(z) &= \sum_{n=-\infty}^{\infty} x(n)z^{-n} \\ &=\sum_{n=2}^{\infty}z^{-n} \\ &=\sum_{n=0}^{\infty} z^{-n-2} \\ &=z^{-2} \sum_{n=0}^{\infty} z^{-n} \\ & = z^{-2} \frac{1}{1-z^{-1}} \end{align}For
b) We can see that
Therefore
And since our unit step response is zero for values , then . Which gives us
c) In the z-domain, convolution is just multiplication, which gives us
Y(z) &= H(z)X(z) \\ &= \frac{1}{1-\frac{1}{2}z^{-1}} * z^{-2} \frac{1}{1-z^{-1}} \\ \end{align}And taking the inverse Z-transform in WolframAlpha gives me:
The math was simply time consuming to do, but with partial fractions it becomes possible to do by hand.
Problem 4
a) We Z transform and find :
b) The poles are given by:
Zeroes are given by:
c) Since our system is causal, and the ROC contains the unit circle, the system is stable.
d) To determine the filter type we need to look at different frequencies, and evaluate the response.
For : We have a zero → the amplitude is zero
for : The distance from the zero increases, while the distance to the pole decreases → The amplitude vil reach is max at
Same reasoning for as for , and aswell as and , but this is not interesting as we only care about
We have a bandpass filter centered around