Resources:
- page=53 Ch. 4
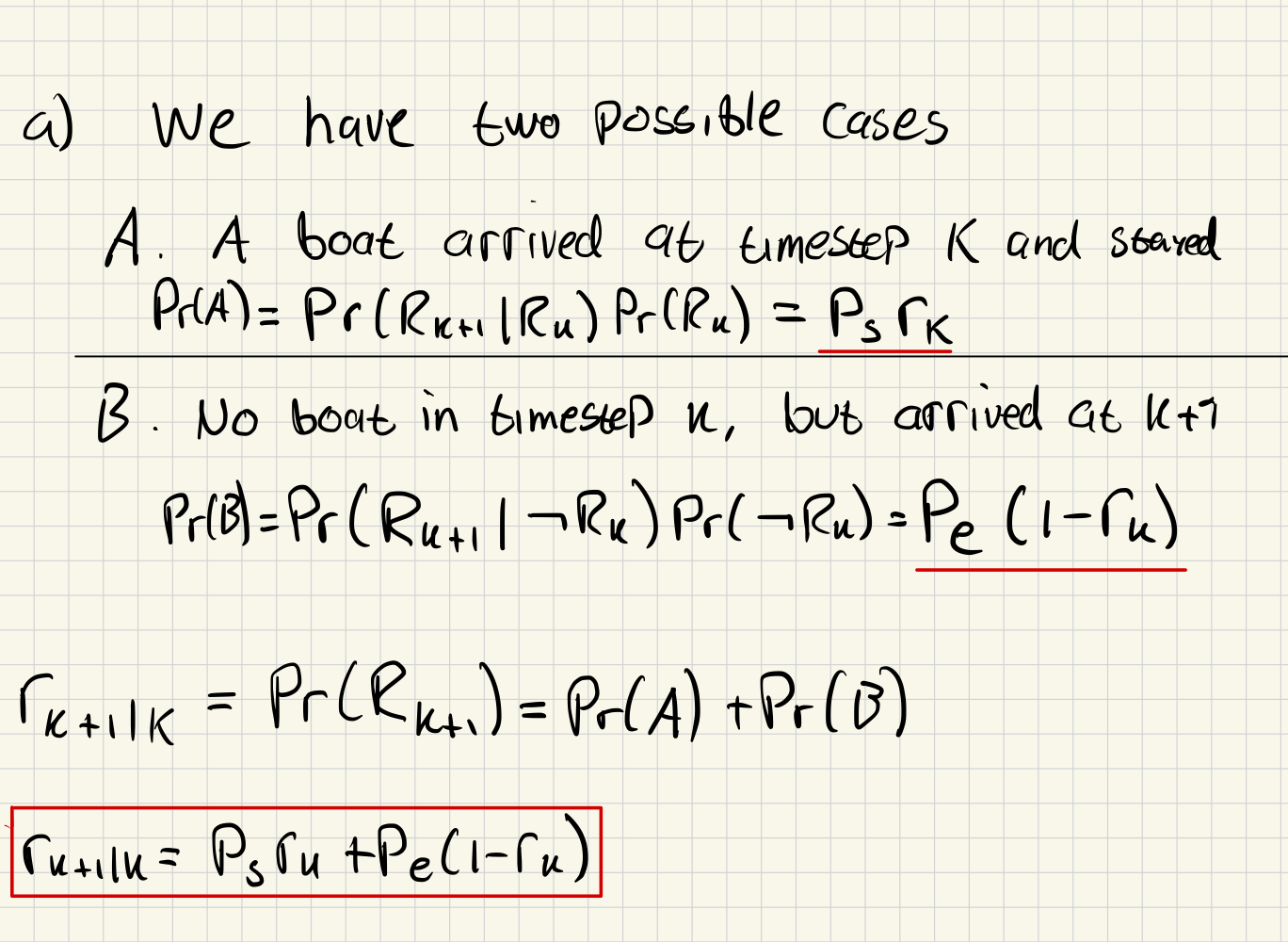
Task 1: Bayesian Estimation of an Existence Variable
a)
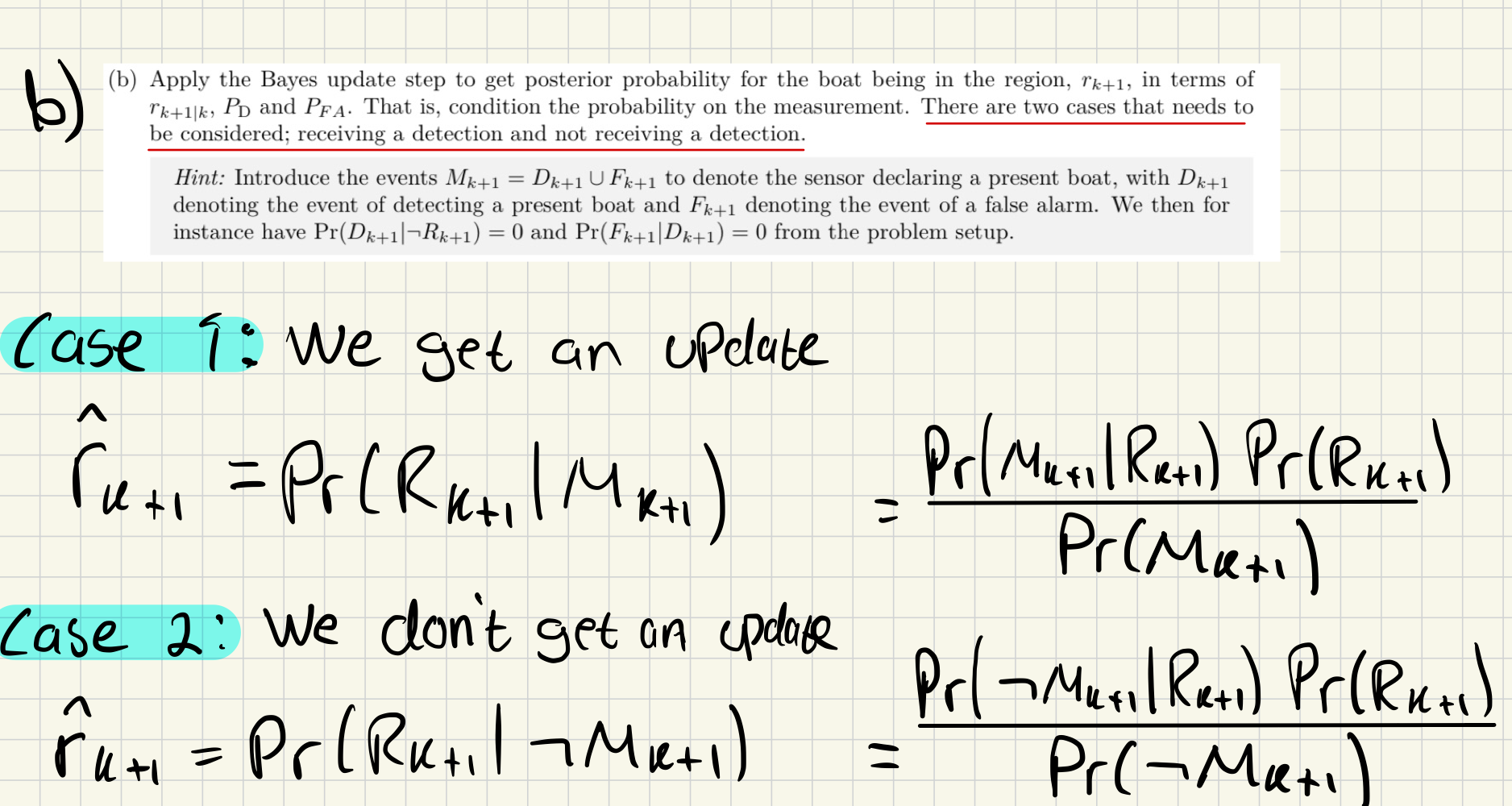
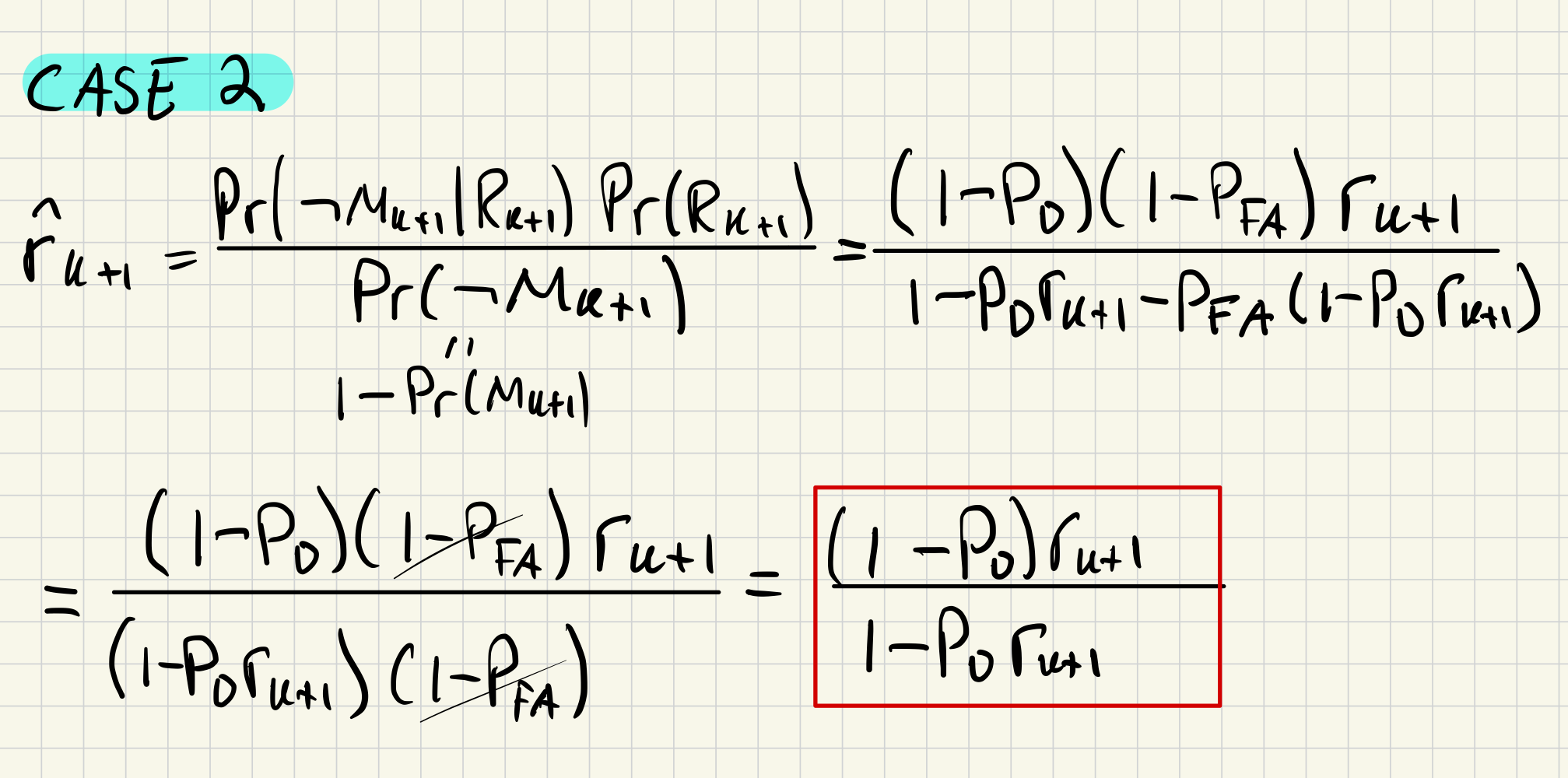
b)

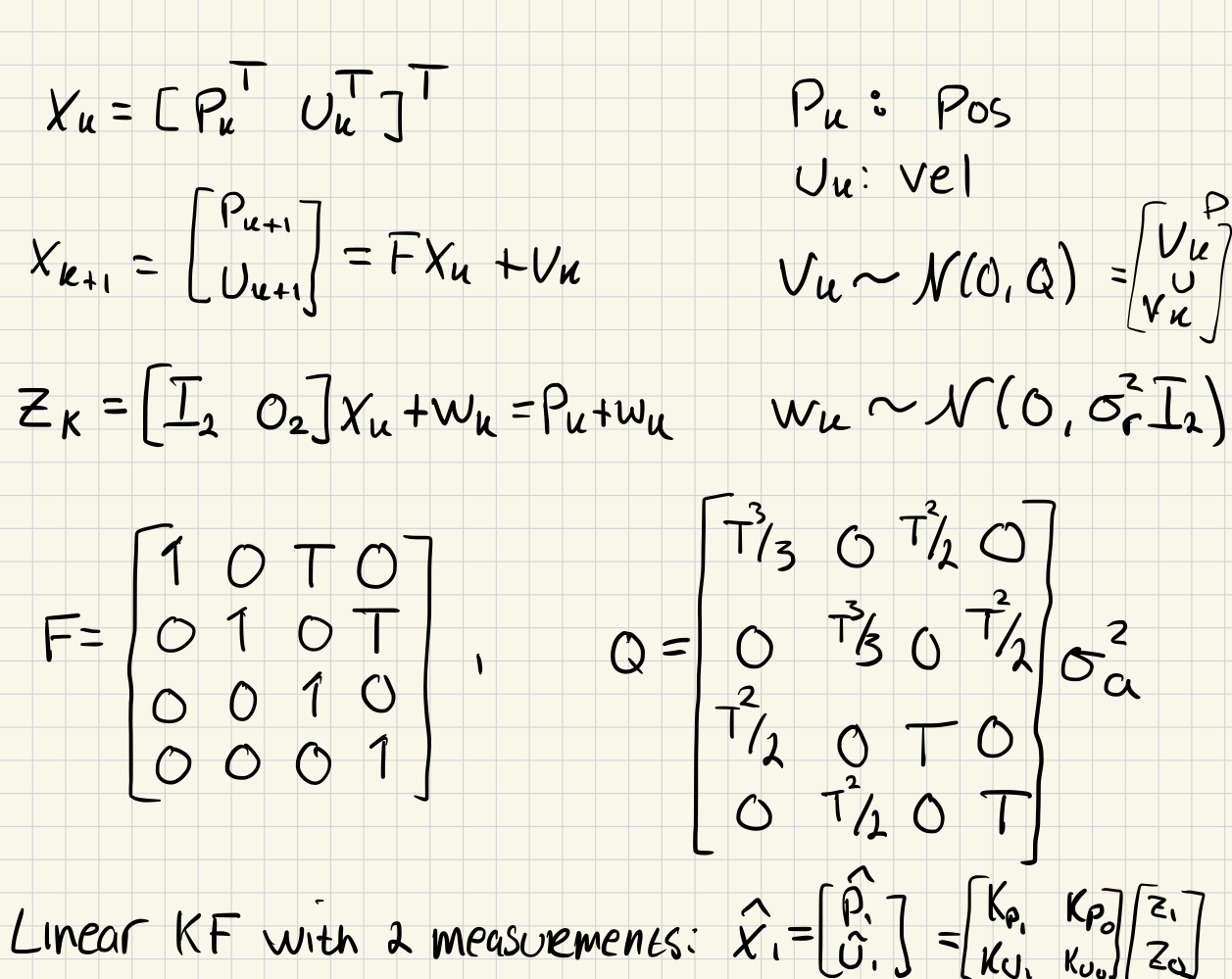
Task 2: KF Initialization of CV Model Without a Prior
KF - Kalman Filter CV model - Assuming nearly constant velocity
and defined in Eq. 4.64 (page=67)
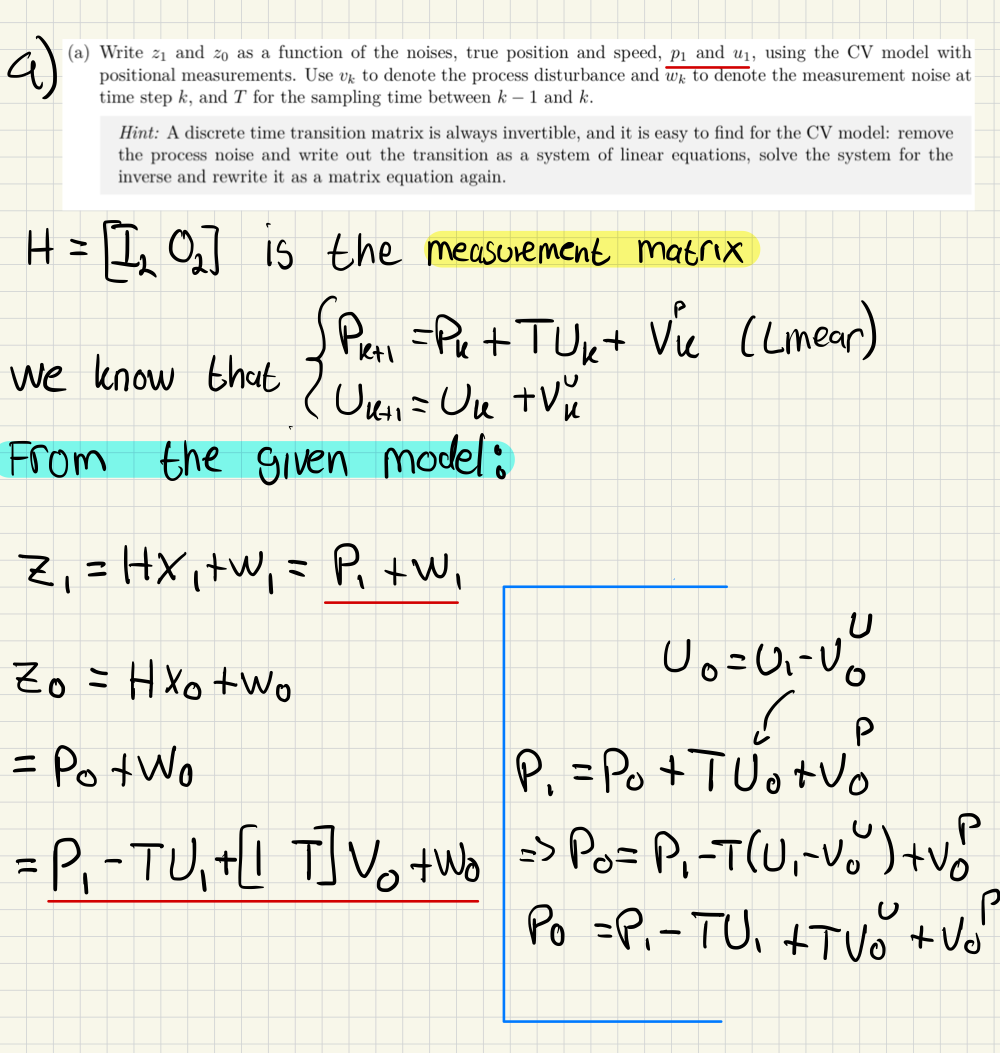
a)
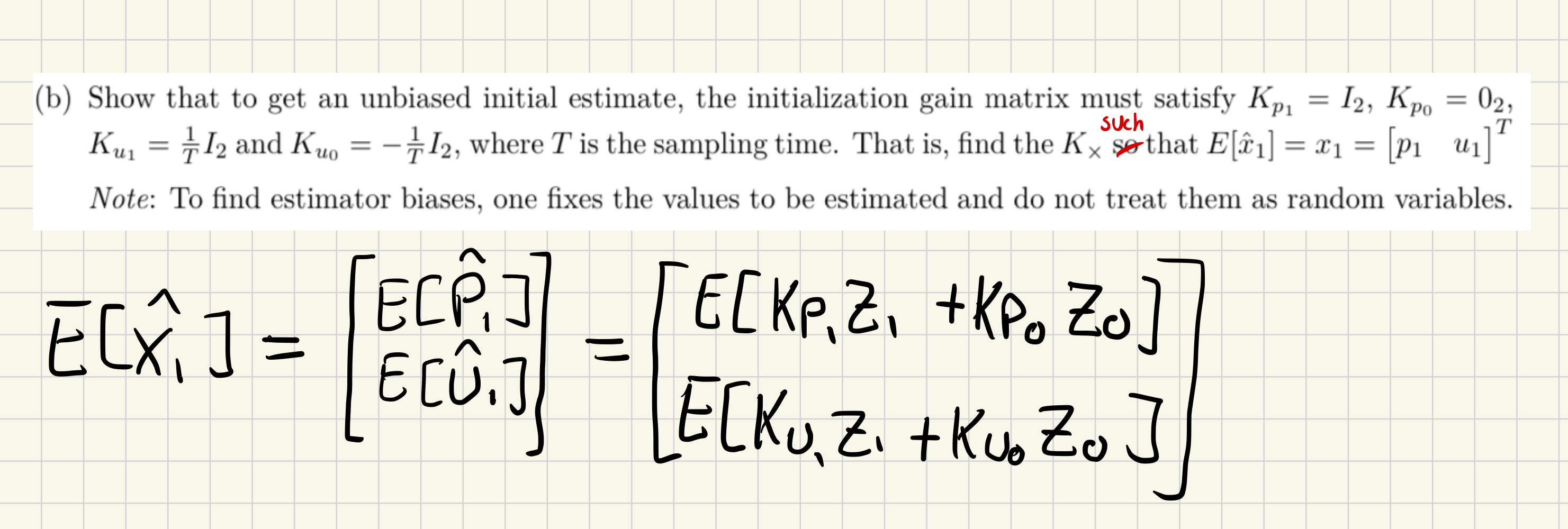
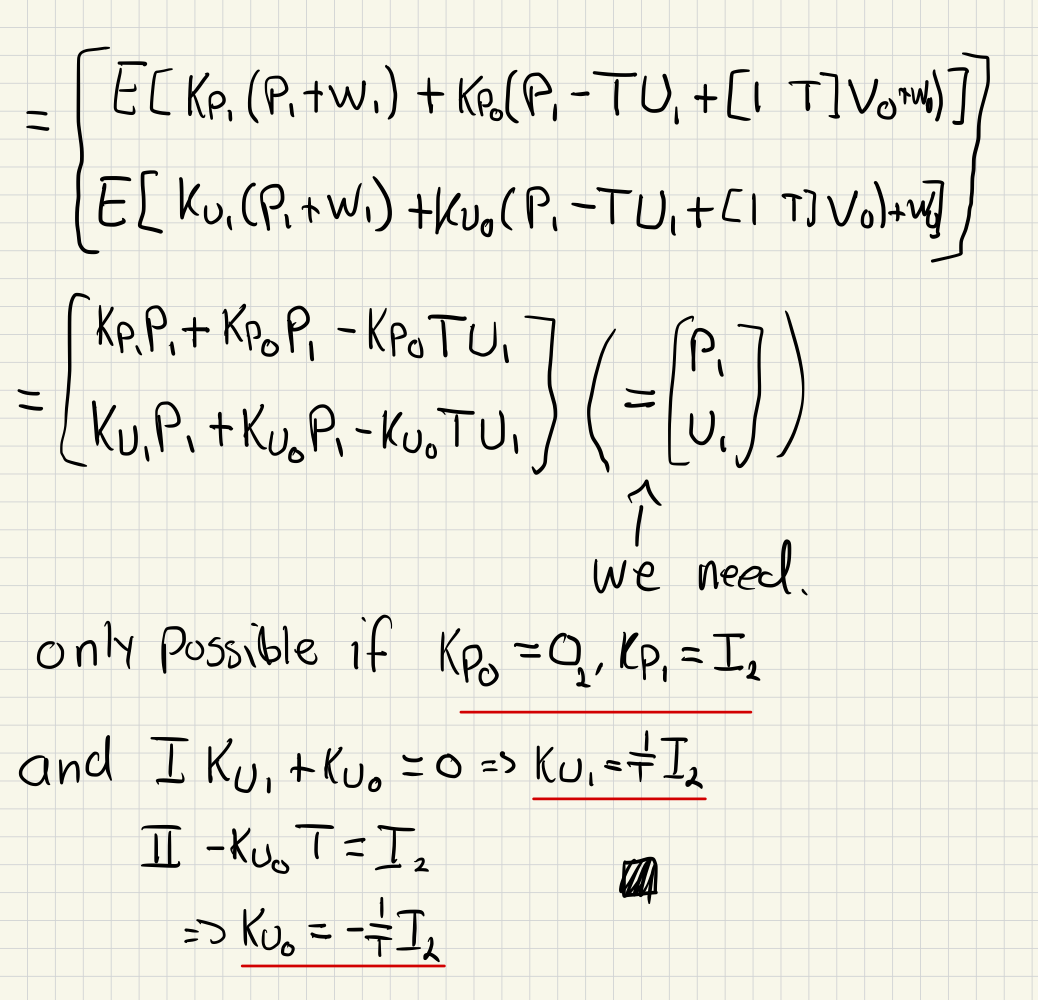
b)
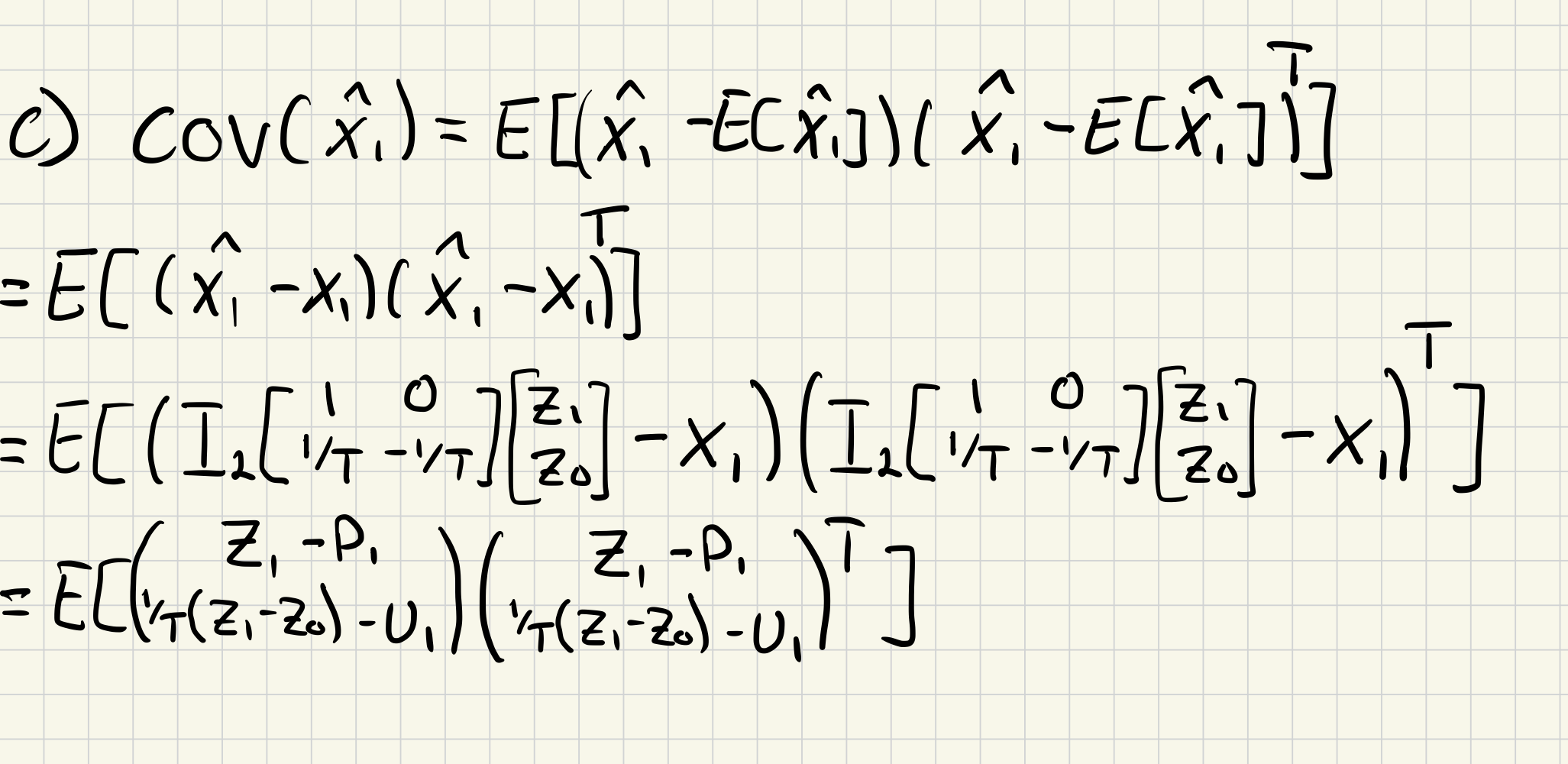
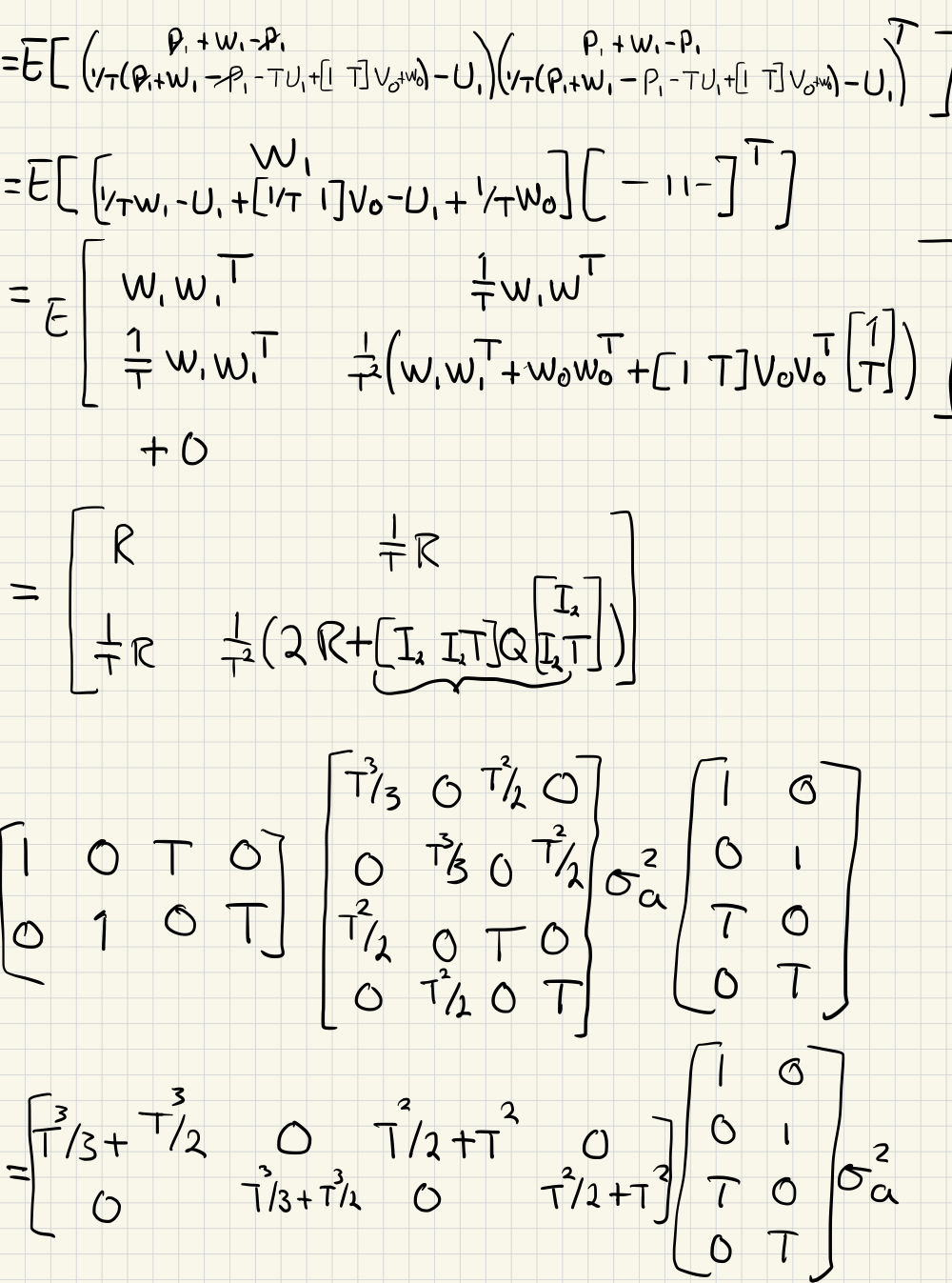
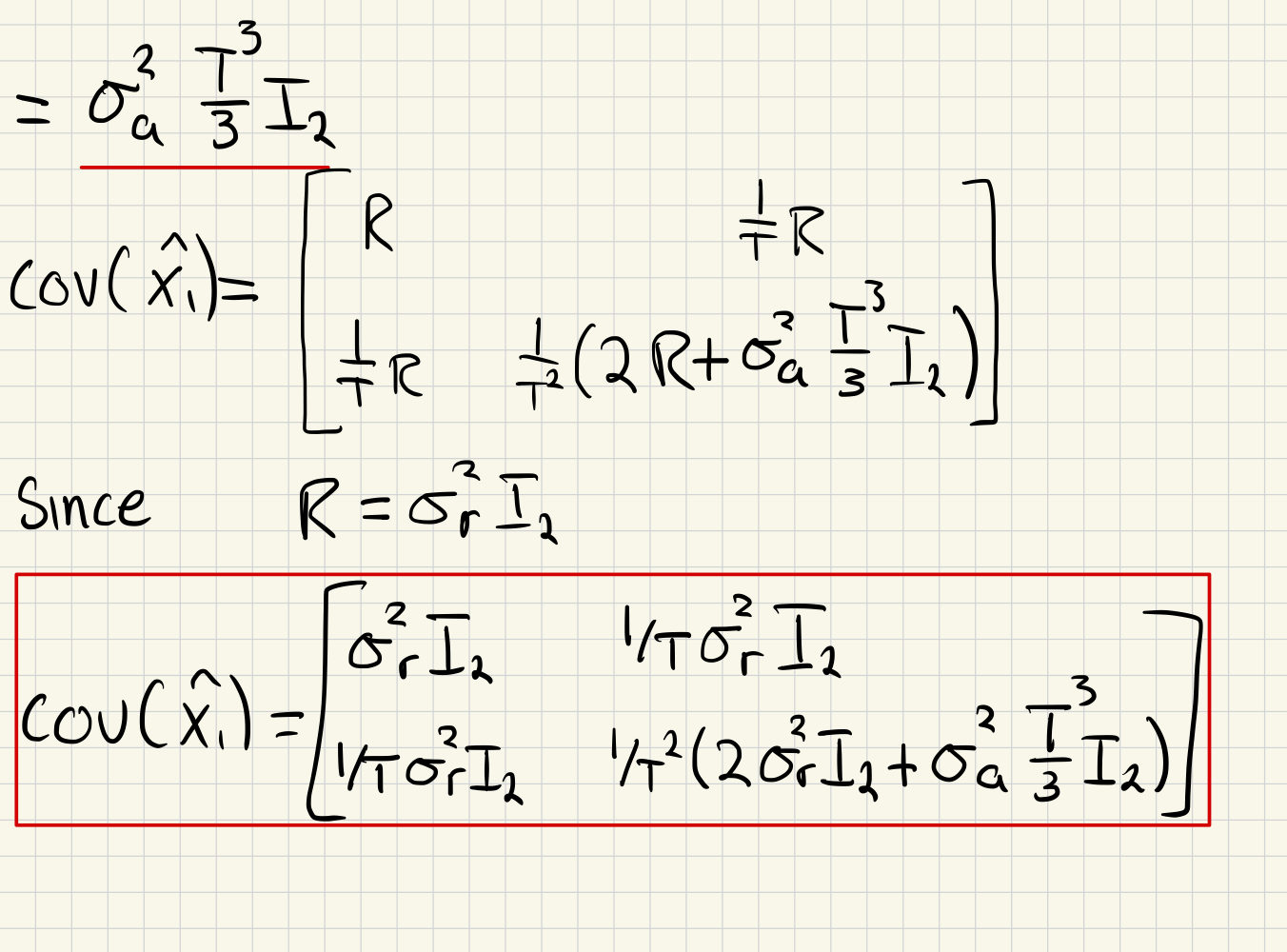
c)
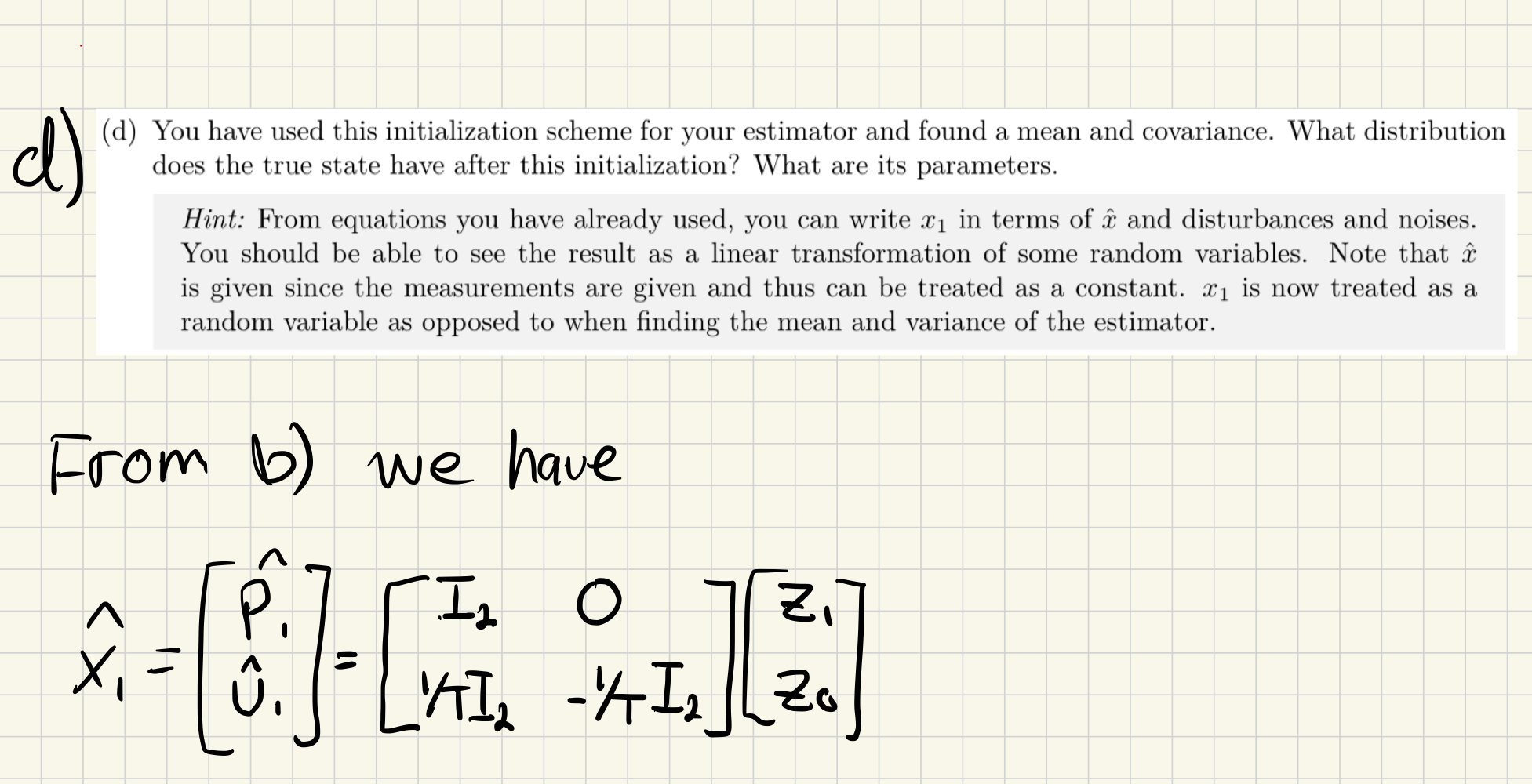
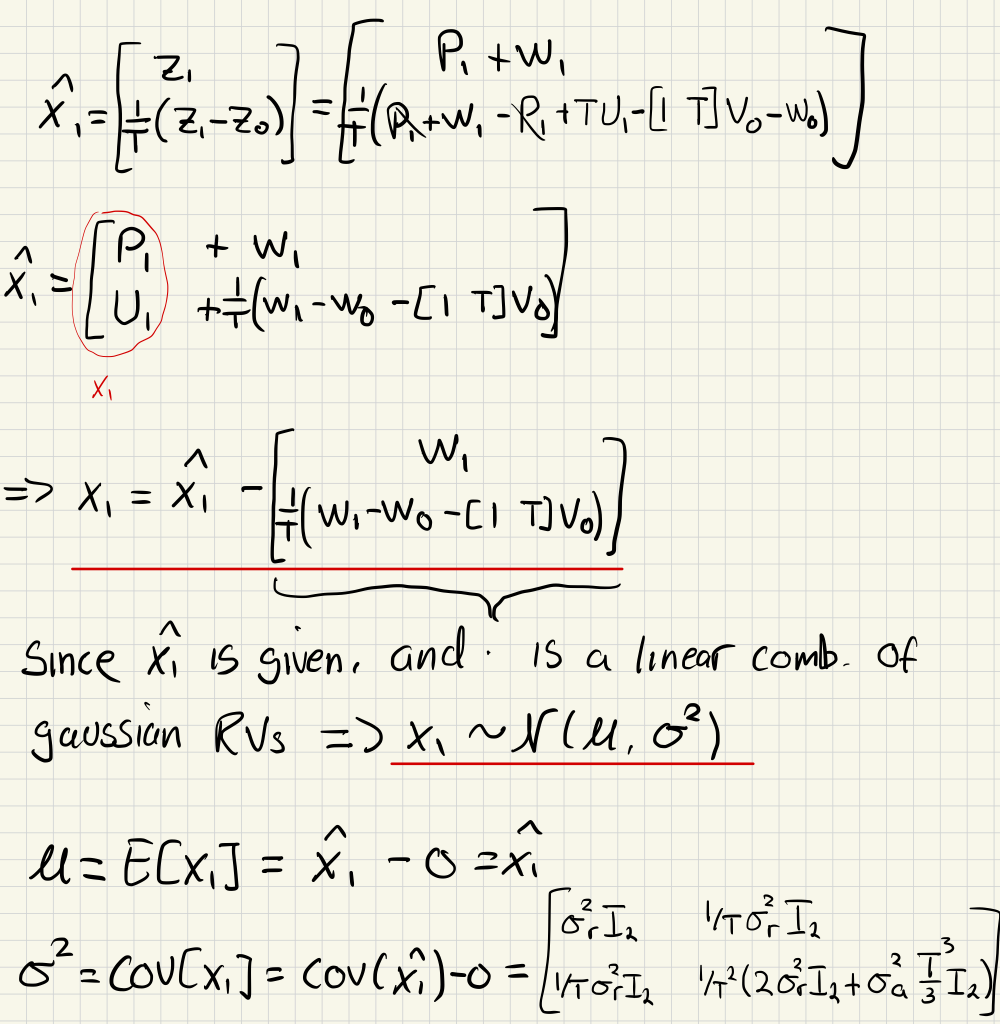
d)
e)
f)
Using the results from task 2c, we can finish implementing initialize.get_init_CV_state.
def get_init_CV_state(meas0: Measurement2d, meas1: Measurement2d,
ekf_params: EKFParams) -> MultiVarGauss:
"""This function will estimate the initial state and covariance from
the two first measurements"""
dt = meas1.dt
z0, z1 = meas0.value, meas1.value
sigma_a = ekf_params.sigma_a
sigma_z = ekf_params.sigma_z
K_p = np.hstack((np.identity(2), np.zeros((2,2))))
K_u = np.hstack(((1/dt)*np.identity(2), -(1/dt)*np.identity(2)))
K_x = np.vstack((K_p, K_u))
z = np.hstack((np.array(z1), np.array(z0)))
R = (sigma_z**2) * np.identity(2)
mean = K_x @ z # x_hat_1
cov = np.block([ # Covariance matrix from 2c
[R, (1/dt) * R],
[(1/dt) * R, (1/dt)**2 * (2 * R + (sigma_a**2) * (dt**3) / 3 * np.identity(2))]
])
init_state = MultiVarGauss(mean, cov)
return init_stateTask 3: Make CV dynamic model and position measurement model
a)
def f(self, x: ndarray, dt: float,) -> ndarray:
"""Calculate the zero noise transition from x given dt."""
x_next = self.F(x, dt) @ x # + v (which is zero)
return x_nextb)
def F(self, x: ndarray, dt: float,) -> ndarray:
"""Calculate the discrete transition matrix given dt
See (4.64) in the book."""
F = np.eye(4) + dt * np.array([[0,0, 1, 0],[0, 0, 0, 1],[0, 0, 0, 0],[0, 0, 0, 0]])
return Fc)
def Q(self, x: ndarray, dt: float,) -> ndarray:
"""Calculate the discrete transition Covariance.
See(4.64) in the book."""
Q = np.array([[dt**3/3, 0, dt**2/2, 0],[0, dt**3/3, 0, dt**2/2],[dt**2/2, 0, dt, 0],[0, dt**2/2, 0, dt]]) * self.sigma_a**2
return Qd)
def predict_state(self,
state_est: MultiVarGauss,
dt: float,
) -> MultiVarGauss:
"""Given the current state estimate,
calculate the predicted state estimate.
See 2. and 3. of Algorithm 1 in the book."""
x_upd_prev, P = state_est
F = self.F(x_upd_prev, dt)
Q = self.Q(x_upd_prev, dt)
x_pred = F @ x_upd_prev
P_pred = F @ P @ F.T + Q
state_pred_gauss = MultiVarGauss(x_pred, P_pred)
return state_pred_gausse)
def h(self, x: ndarray) -> ndarray:
"""Calculate the noise free measurement value of x."""
x_h = self.H(x) @ x
return x_hf)
def H(self, x: ndarray) -> ndarray:
"""Get the measurement matrix at x."""
H = np.hstack((np.identity(2), np.zeros((2,2))))
return Hg)
def R(self, x: ndarray) -> ndarray:
"""Get the measurement covariance matrix at x."""
R = self.sigma_z**2 * np.identity(2)
return Rh)
def predict_measurement(self,
state_est: MultiVarGauss
) -> MultiVarGauss:
"""Get the predicted measurement distribution given a state estimate.
See 4. and 6. of Algorithm 1 in the book.
"""
x_hat, P = state_est
z_hat = self.H(x_hat) @ x_hat
H = self.H(x_hat)
S = H @ P @ H.T + self.R(x_hat)
measure_pred_gauss = MultiVarGauss(z_hat, S)
return measure_pred_gaussTask 4: Implement EKF in Python
@dataclass
class ExtendedKalmanFilter:
dyn_modl: WhitenoiseAcceleration2D
sens_modl: CartesianPosition2D
def step(self,
state_old: MultiVarGauss,
meas: Measurement2d,
) -> MultiVarGauss:
"""Given previous state estimate and measurement,
return new state estimate.
Relationship between variable names and equations in the book:
\hat{x}_{k|k_1} = pres_state.mean
P_{k|k_1} = pres_state.cov
\hat{z}_{k|k-1} = pred_meas.mean
\hat{S}_k = pred_meas.cov
\hat{x}_k = upd_state_est.mean
P_k = upd_state_est.cov
"""
state_pred = self.dyn_modl.predict_state(state_old, meas.dt)
meas_pred = self.sens_modl.predict_measurement(state_pred)
x_hat = state_pred.mean
P = state_pred.cov
z_hat = meas_pred.mean
z = meas.value
S = meas_pred.cov
H = self.sens_modl.H(x_hat)
kalman_gain = P @ H.T @ np.linalg.inv(S)
innovation = z - z_hat
state_upd_mean = x_hat + kalman_gain @ innovation
state_upd_cov = (np.identity(len(x_hat)) - kalman_gain @ H) @ P
state_upd = MultiVarGauss(state_upd_mean, state_upd_cov)
return state_upd, state_pred, meas_predTask 5: Analyse the outputs of the KF
a)
The Normalized Innovations Squared is given by
Link to original
def get_nis(meas_pred: MultiVarGauss, meas: Measurement2d) -> float:
"""Calculate the normalized innovation squared (NIS), this can be seen as
the normalized measurement prediction error squared.
See (4.66 in the book).
Tip: use the mahalanobis_distance method of meas_pred, (3.2) in the book
"""
S = meas_pred.cov
z = meas.value
z_hat = meas_pred.mean
innovation = z - z_hat
nis = innovation.T @ np.linalg.inv(S) @ innovation
return nisb)
The Normalized Estimation Error Squared is given by
Link to original
def get_nees(state_est: MultiVarGauss, x_gt: np.ndarray):
"""Calculate the normalized estimation error squared (NEES)
See (4.65 in the book).
Tip: use the mahalanobis_distance method of x_gauss, (3.2) in the book
"""
x_hat = state_est.mean
P = state_est.cov
NEES = (x_hat - x_gt).T @ np.linalg.inv(P) @ (x_hat - x_gt)
return NEESd)
[!Definition of Commensurate] Corresponding in size or degree; in proportion. ”salary will be commensurate with age and experience”
1. The state errors should be acceptable as zero mean.
- This ensures that the filter is not biased. If it is biased, it might diverge over time.
- This can be checked by placing the system in a known position and looking for drifts
2. The state errors should have magnitude commensurate with the state covariance yielded by the filter.
- This ensures that the filter is not over/under-confident in its estimates. This can lead to poor performance
- This can be checked using NEES. Under is an example from a previous task

{kind=link}
3. The innovations should be acceptable as zero mean.
- The innovation is defined as the difference between the predicted and actual measurement, . If it is not zero mean, it means that the predictions are biased, and therefore it might not correctly track the states.
- Average of the innovation over many time steps. Should average to zero with sufficiently many samples.
4. The innovations should have magnitude commensurate with the innovation covariance yielded by the filter.
- The innovation covariance reflects uncertainty in the measurements. Same logic as 2
- Can be checked using NIS, and should be checked to neither be too high or too low.
5. The innovations should be acceptable as white
- I don’t understand what is meant by “acceptable as white”
-