{kind=link}
This assignment is about the Newton-Euler method for developing a dynamic model of a mechanical system. This topic is treated in the course book from chapter 6.13 to 7.3.
Problem 1 (Satellite)
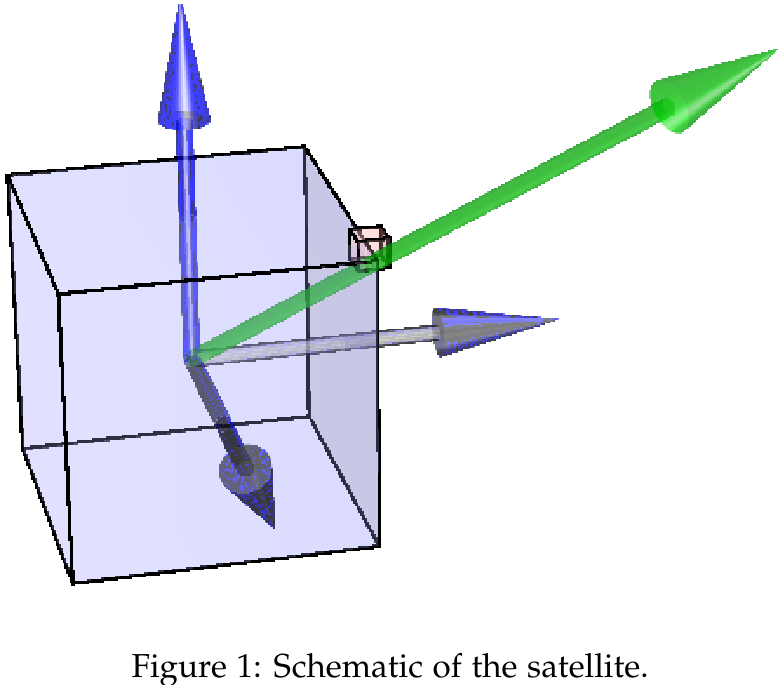
Case A:
- The satellite is a cube of uniform, unitary density, having an edge of cm
- Unitary density → Case B:
- The satellite is the cube mentioned above, with the addition of a punctual mass of placed at one of the cube’s corners
The force of gravity is given by
The inertia matrix in the reference frame shown in the figure is
Which is with respect to the COM expressed in the body frame
a)
We are examining case A
We want to find and by using the Newton-Euler Equations of motion.
We know that the force acting on the satellite is the force of gravity, which is given. We therefore haveNewton-Euler Equations of motion
Resources: page=281
Linear Motion (Translation)
Link to originalAngular Motion (Rotation about CG)
Where
Solution for
\dot{v}_{c}^iWhere is the mass of earth, is the gravitational constant, and is the distance from the world center to the satellites position.
We then find , where the torque is zero due to there being no forces except gravity
Solution for
\dot{\vec{\omega}}_{b/i}^bThis gives us Due to being constant. This is logical since there is nothing slowing the angular rotation (no friction etc).
b)
We are examining case B
The center of mass has now shifted due to a point mass at kg at one of the corners of the cube. We now need to find the new inertia matrix by using the Parallel Axis Theorem.
The new COM is given by
Then the new inertia matrix, has two contributions
Where the term is the Skew-Symmetric Matrix, and
Depending on which corner we choose. Then we can find the new inertia matrix around the new COM by using PAT
Where . Solving for gives
Inserting into the following equation gives our new expression
We get the new expression for , by inserting our new expression for into the following equation
c)
Doing the following in the Satellite3DExample.m
%update the inertia matrix for the case with extra mass
if with_added_mass
m_added = 0.1;
b_r_0 = l*[1;1;1]; %vector from center of the satellite to the added mass
b_r_s = -m_added/(m_added+m)*0.25*[1;1;1]; %TODO
% inertia matrix of satellite from cube center
b_M_o = b_M_c - (m_added*0.25)*[0 1 -1; -1 0 1; 1 -1 0]*0.25*[0 1 -1; -1 0 1; 1 -1 0]; %TODO
% inertia matrix of satellite from mass center
b_M_c = b_M_o + (m_added + m)*[0 b_r_s(3) -b_r_s(2); -b_r_s(3) 0 b_r_s(1); b_r_s(2) -b_r_s(1) 0]; %TODO
end And the following in SatelliteDynamics.m
Dynamics
i_v_c_dot = -G*m_T/(abs(i_r_c)).^2*i_r_c/abs(i_r_c); %TODO
b_omega_ib_dot = -inv(b_M_c)*[0 b_omega_ib(3) -b_omega_ib(2); -b_omega_ib(3) 0 b_omega_ib(1); b_omega_ib(2) -b_omega_ib(1) 0] * b_M_c*b_omega_ib; %TODO From the simulation (changing the boolean with_added_mass), we observe that:
Without the added mass, the angular velocity is constant, but with the added mass it changes with time.
Problem 2 (Pendulum on an Oscillator)
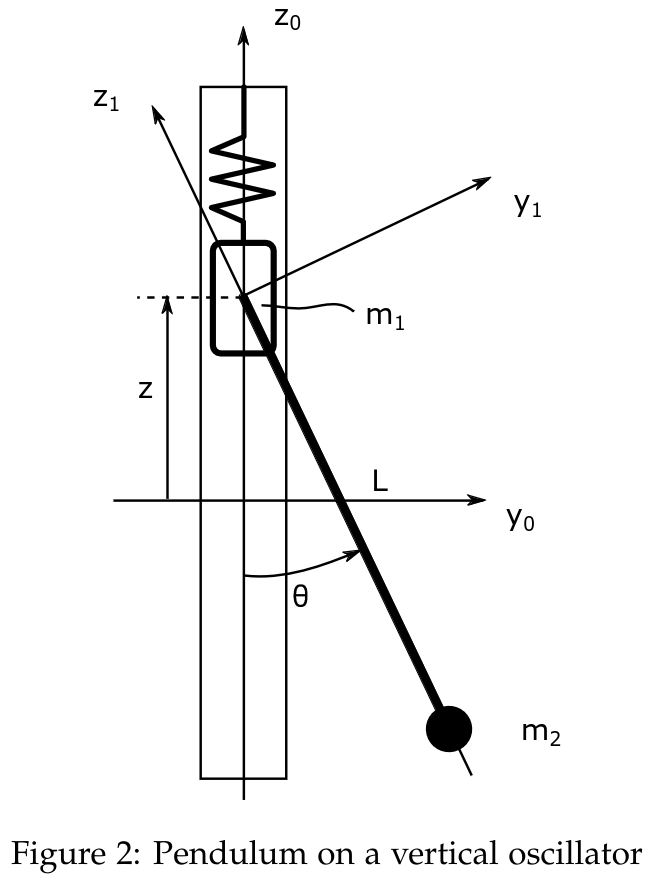
a)
The position of mass 1 can be expressed as
And the acceleration is given by
The position of mass 2 can be expressed as
Or expressed in the -frame as
Where , and is the Principal Rotation Matrix around the -axis.
Q.E.D
I realized (a bit too late) that i could’ve used the formula
Where and , which would yield the same result (and being a bit easier.)
b)
From Newton-Euler Equations of motion
The forces acting on mass 1 are; gravity, the spring force and the joint force.Newton-Euler Equations of motion
Resources: page=281
Linear Motion (Translation)
Link to originalAngular Motion (Rotation about CG)
Where
Where
The forces acting on mass 2 are; gravity and the joint force
Where
We also want the torque from mass 2. We can get this by using the formula .
c)
We have
Since we know that
We can combine equation 5 and 3 (substituting for ), and get
Lastly, combining equation 5 and 6 we get
Which are the two equations we were supposed to show.
d)
The difference is that mass 2 now has a new COM, making equation 6 different (by adding a new torque), and finding the new moment of inertia. Applying this will give the new equations.
Due to the calculations being quite comprehensive, i will not be writing these in LaTeX due to the fact that i’ve already used too many hours on this, but i will give my final result.
e)
By thinking of the problem as rotation around the hinge point, we neglect the interaction of the two bodies ()