{kind=link}
Lecture 4&5 - Linear Programming (LP) Quadratic Programming Problem on Standard Form KKT (Karush–Kuhn–Tucker) Conditions
Problem 1 (35%) LP and KKT Conditions (Exam August 2000)
Consider the following LP in standard form
Link to originalWhere and . And the KKT (Karush–Kuhn–Tucker) Conditions are given by
Link to original
a) Newton Direction
The Newton Direction is given by
Link to originalMeaning that since the Hessian is zero, the Newton Direction is not defined (dividing by zero).
b) Convex Objective Function
For a optimization problem to be convex the following must hold
Link to originalCriterions
- The objective function is a Convex Objective Function
- The equality constraint functions are linear, and
- The inequality constraint functions , are Concave
Finding if the objective function is convex The definition of a convex objective function is given by
Link to originalWhere in our case, .
Meaning that the objective function is convex (and actually also concave).
Since the equality and inequality constraint are linear, they are (by the same logic) both convex and concave. The problem stated in the top of the document is therefore a convex optimization problem.
c) The Dual LP Problem
From Exercise 2 - LP and KKT Conditions
e)
Using the first KKT condition
The equality constraint at
And the last condition
From equation 1
c^Tx^* &= (A^T\lambda^*+s^*)^Tx^* \\ &=\lambda^{*T}Ax^*+s ^{*T}x^* \\ &=\lambda^{*T}b+0 \\ &=b^T\lambda^*, \;\;\; \text{Q.E.D} \end{align}The last line is legal since it will be the same scalar operations
Link to original
d) The Dual LP Problem
The optimal solutions of the objective functions have the same values.
e) Basic Feasible Point (BFP)
Basic Feasible Point (BFP)
A vector is a basic feasible point if
- is Feasible
- There exists a subset of the index set such that
- contains exactly indices
- (that is, the bound can be inactive only if ).
- the matrix is defined by , and is nonsingular, and is the ‘th column of .
is called a basis for the LP, and the indices not in are called .
Link to original
f) LICQ
From the LICQ we have that
We findGiven the point and the active set , we say that the linear independence constraint qualification (LICQ) holds if the set of active constraint gradients is linearly independent.
Link to original
Meaning that if has full row rank, all of the columns in the gradient are linearly independent, thus satisfying the LICQ.
Problem 2 (40%) LP
We need to put the problem on the following form
Link to original
a) Slack Variable
We set and (in kg). We want to maximize
Aka minimizing
Assuming that we will not have a negative price, we have . We also have the constraints
We want to have an equality constraint, and we therefore add a Slack Variable, giving us
b)
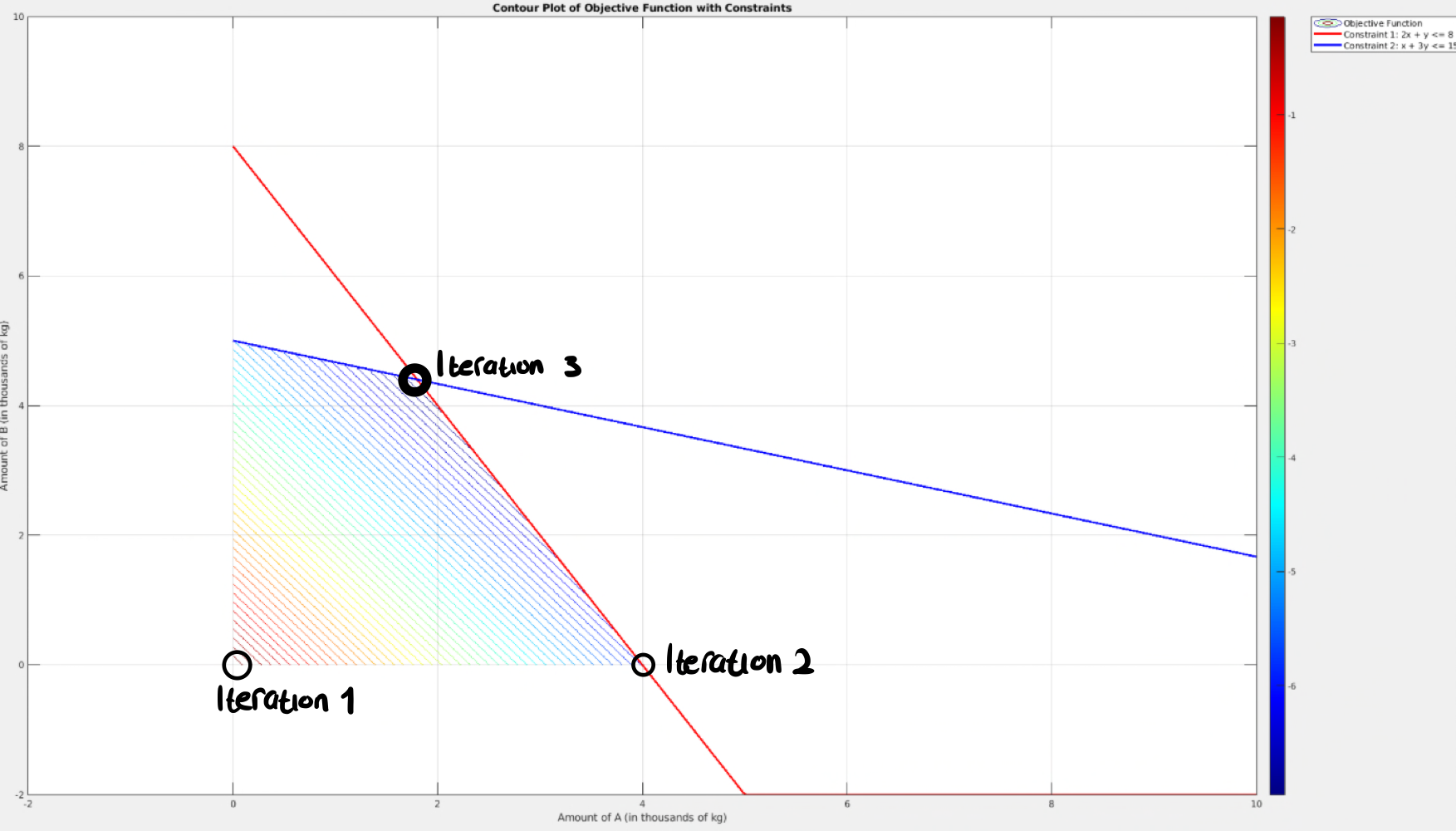
c)
As seen in the figure from b), we see that the solution is in the intersection between the constraints. The non-negative constraint is not active in iteration 3.
d)
done in b)
e)
According to the theory in Ch. 13.3 (Simplex Method), the algorithm output is expected.
Problem 3 (25%) QP and KKT Conditions (Exam May 2000)
A general QP can be formulated as
Link to original
a) Active Set
The active set is given by
Link to originalWhich gives
b) KKT (Karush–Kuhn–Tucker) Conditions
Link to originalThe Lagrangian is given by
Finding the Gradient of the Lagrangian gives
From the complementary condition we know that the multiplier is zero if the constraint is not active at the solution.
We know that all the constraints in the active set must hold at .
From the dual feasibility criterion we know that the ineq. constraint that are not active at the soltuion must hold, and that these multipliers must be greater than zero. We can therefore write the KKT conditions as