{kind=link}
Objective: Use the heading and speed controller developed in the previous assignments to ensure that the marine craft can be set to follow a path consisting of several straight line segments.

Problem 1: LOS Guidance Law for Straight-Line Path Following
a)
The selected LOS guidance law implemented is the Proportional LOS Guidance Law (Ch. 12.4.2 in Fossen):
Where , and is the lookahead distance.
The only tuneable parameter here is the lookahead distance, which we set to be due to the ship being quite large. led to the system being unstable.
This guidance law works by calculating the desired heading between two waypoints, and adjusting the heading according to the deviation . of the ship from the path.
b)

c)
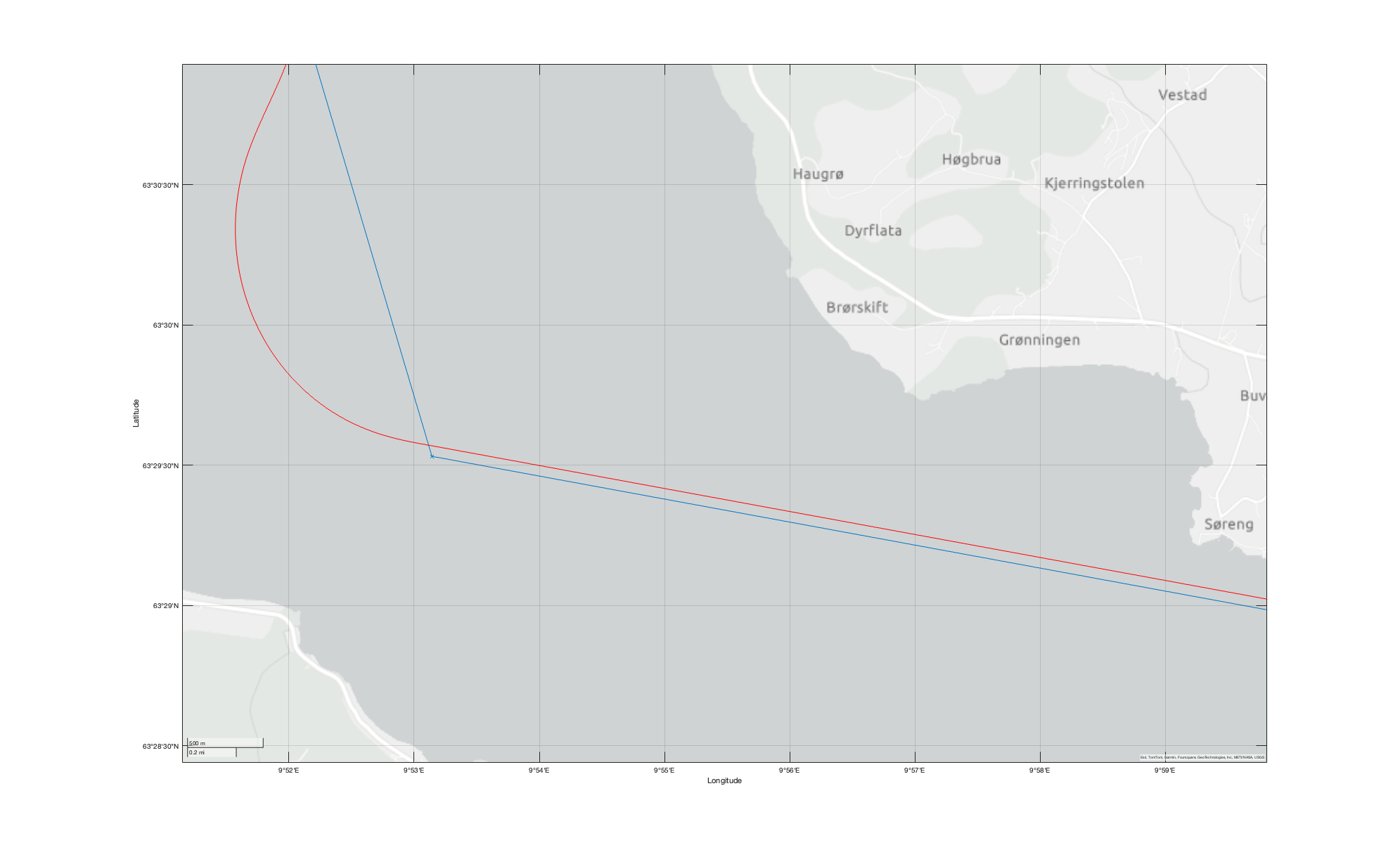
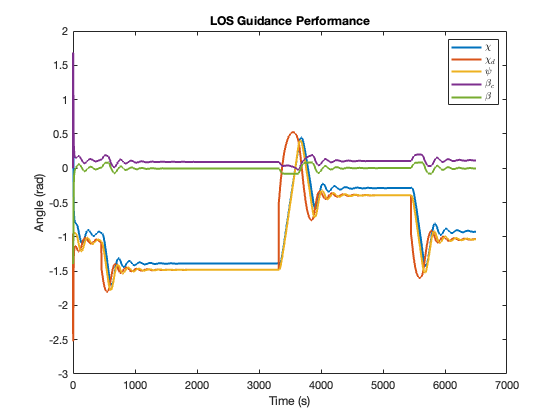
We notice steady state error due to not having integral action. This is due to the constant disturbances (ocean current and wind) shown in the picture below.
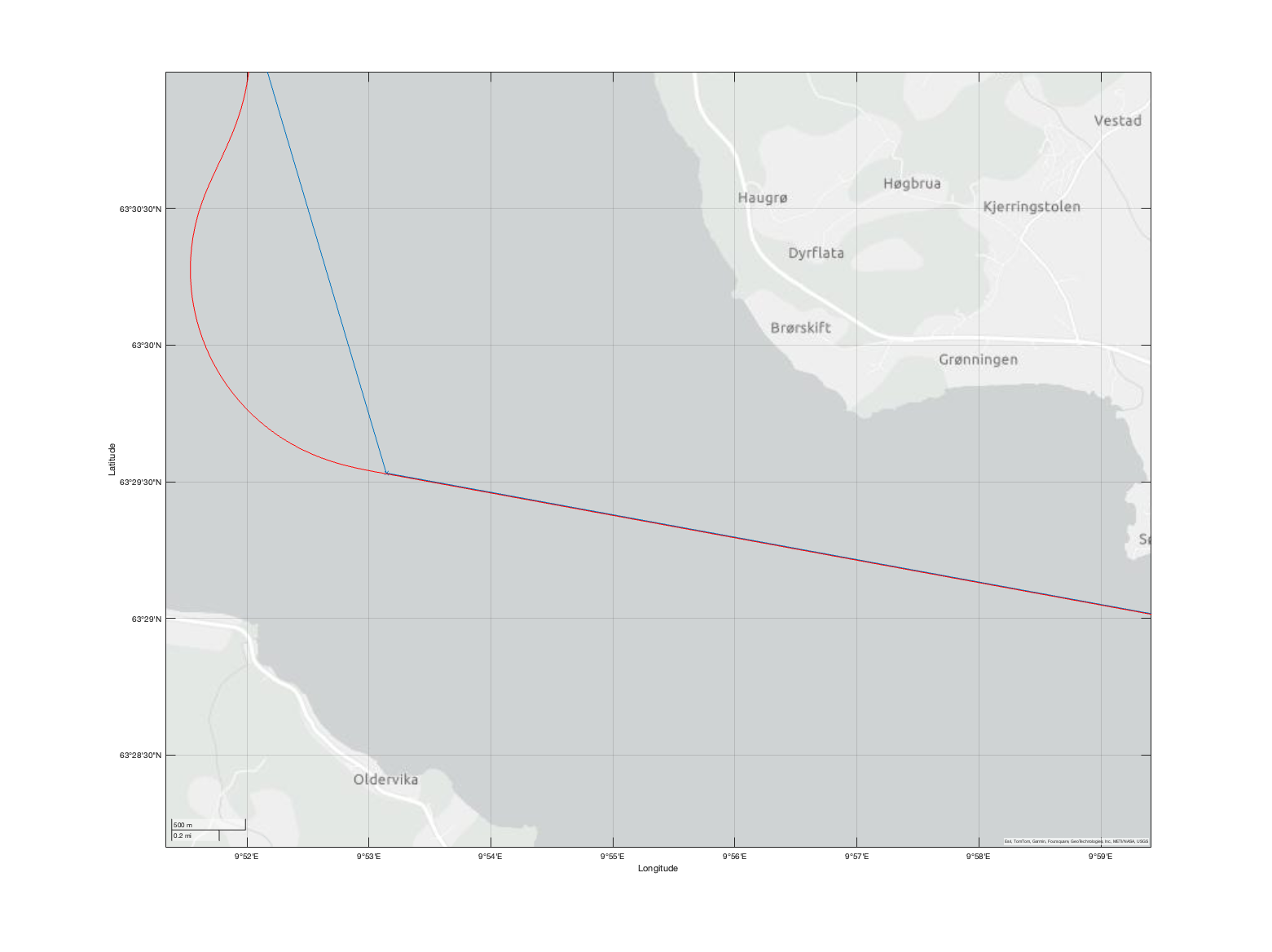
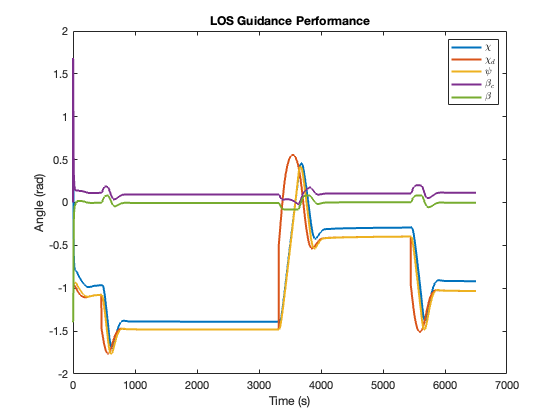
This effect is not present when we remove the disturbances (current and wind), as shown in the figure below.
Problem 2: Crab Angle Compensation and Integral LOS
a)
We see that crab angle compensation is not necessary as there is no current. However, if there were disturbances, some sort of crab angle compensation would be necessary.
b)
Since we have a current, we get a crab angle. It is therefore necessary to implement something to counteract this, such as crab angle compensation.
c)
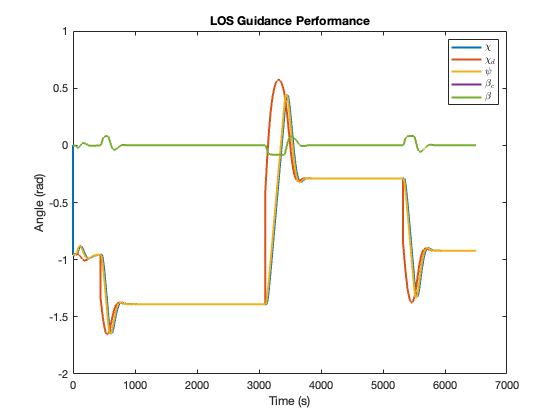
When taking the crab angle into account, we saw an improvement in the ability to follow the reference course as shown in the figure below.
d)
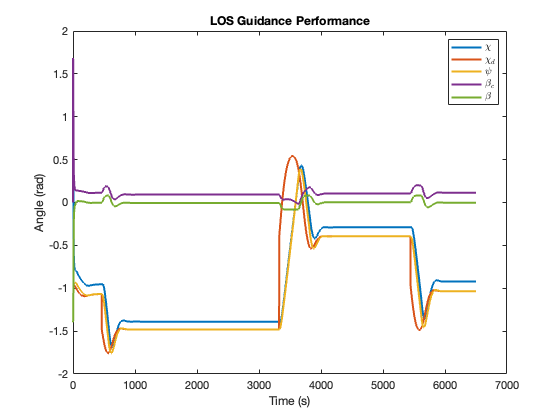
Using ILOS instead of LOS also improved the ability to track the reference course by removing the steady state error experienced in task 1c, as shown in the figure below.
ILOS control is a good choice when dealing with disturbances like wind or currents because it adjusts the course over time instead of trying to compensate instantly. This makes the path smoother and avoids sudden changes, unlike direct crab angle compensation, which tries to immediately counteract disturbances. However, ILOS can be a bit slower to react and might even cause oscillations if it’s not tuned well.
The pros of ILOS guidance is the fact that no velocity measurements is needed, but we can use the integral action to approximate . The cons of ILOS is that we need to carefully tune the variable to avoid wind-up and overshooting. ILOS is also not proven to have global stability, but local stability can be proven for a linearised version around [1].
[1] Thor I. Fossen (2021) Handbok of Marine Craft Hydrodynamics. and Motion Control, Wiley