{kind=link}
Resources:
- Chapter 6, 9 in Fossen.
Objective: In this assignment, you are going to implement a propulsion system and a controller to control the speed of the ship model you developed in the previous assignment. To solve this task, you will have to simulate additional states; do this by extending the state vector as needed.
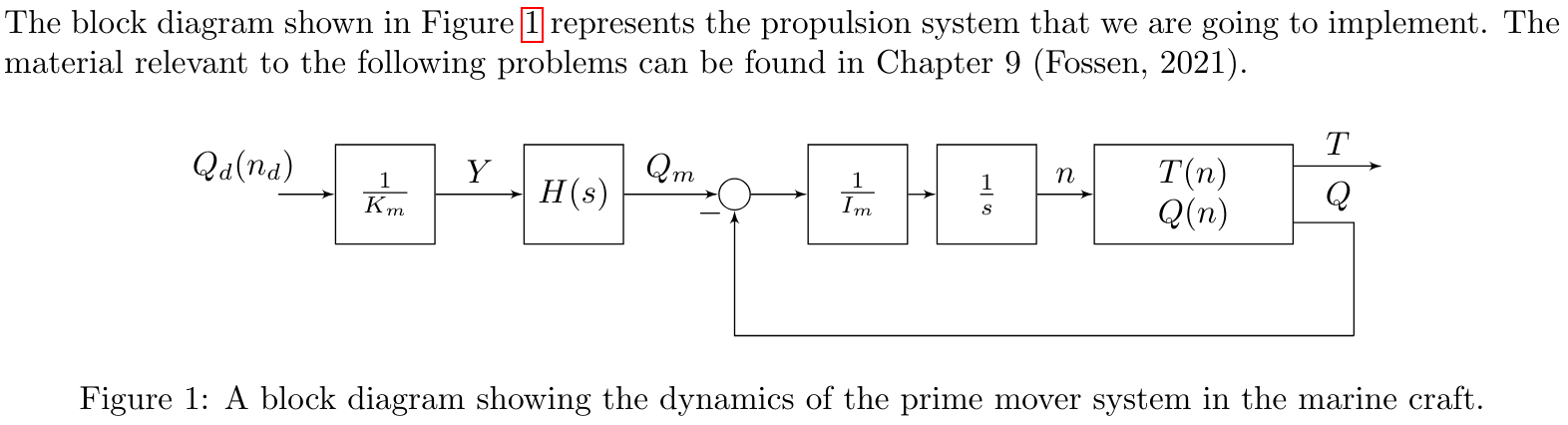
Problem 1: Propeller Revolution and Speed Control
a)
Implemented by using the function wagening()
% ...
Ja = 0;
z = 4;
PD = 1.5;
AEAO = 0.65;
[KT, KQ] = wageningen(Ja, PD, AEAO, z);
% ...Where
- is the thrust coefficient.
- is the torque coefficient.
- is the open-water advance coefficient.
- is the pitch/diameter ratio
- is the blade area ratio
- is the number of propeller blades
b)
See Matlab
c)
Equation 9.8 is given by
And implemented by
Q = rho * Dia^5 * KQ * abs(n) * n;Where
- is the density of the water
- is the propeller diameter
- is the actual shaft velocity
d)
Equation 6.136 is given by
This means that when , and we can rewrite Eq. 6136 as
e)
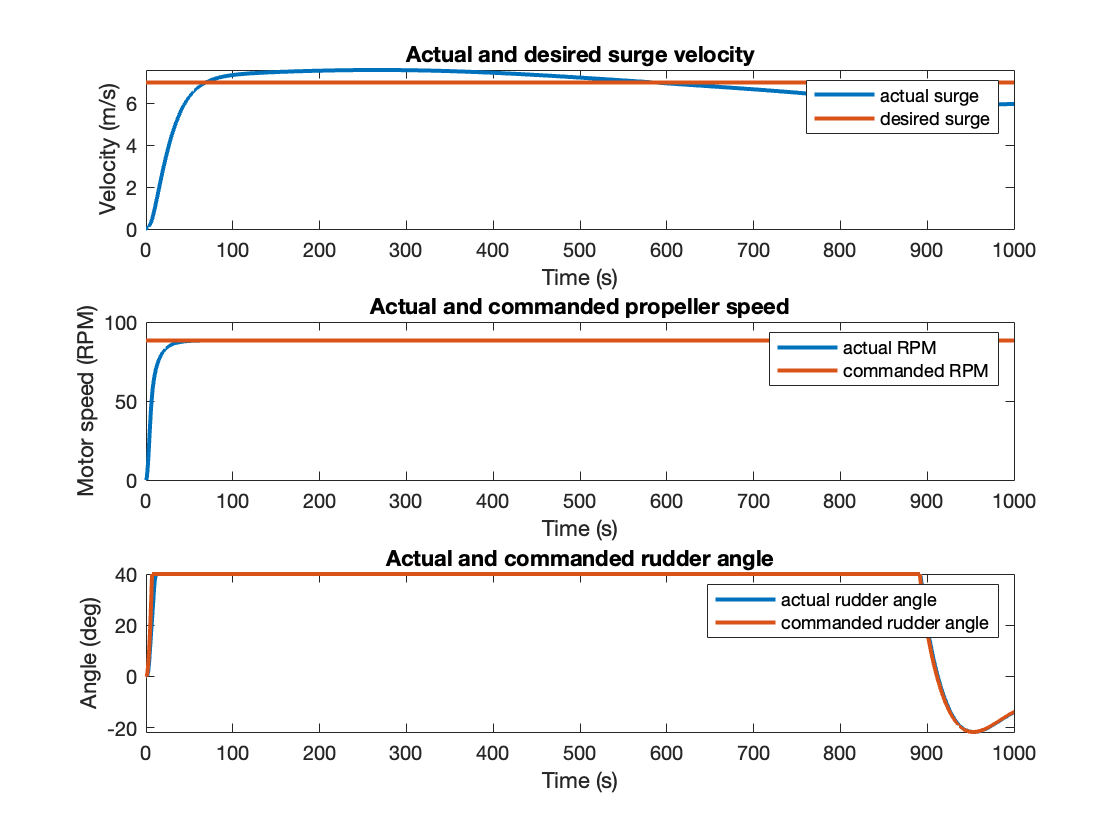
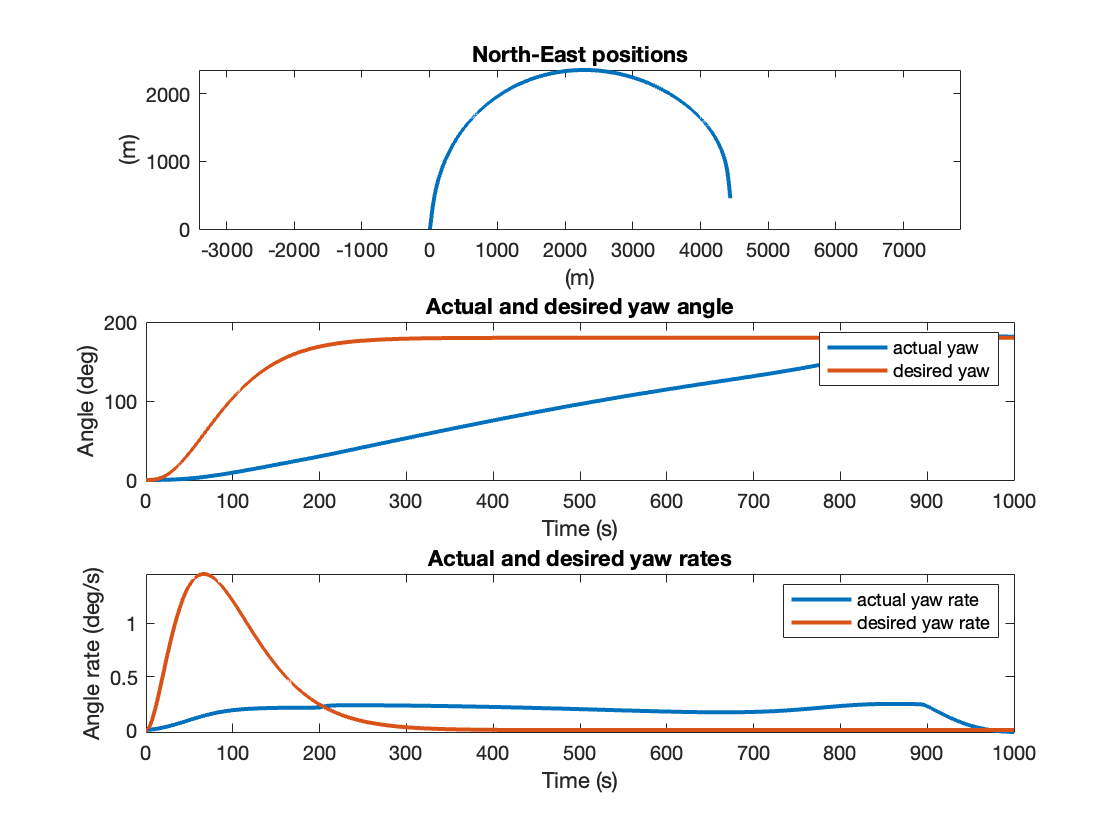
We achieve the desired speed when the heading angle is constant. This is due to the friction being zero.
f)
We need to change the open-loop controller to a closed-loop controller.